12
Autonomous Learning Systems in Mobile Robotics
The area of mobile robotics is, perhaps, the most natural area for implementation of ALS. By virtue of their role to sense, act, make decisions, plan and predict as humans but without direct human involvement robots are, in fact, the most obvious physical embodiment of ALS. In this chapter the application of ALS to laboratory-type mobile robots Pioneer 3DX (ActiveMedia, 2004) will be described based on the experiments made in Infolab21, Lancaster University by the author and his students.
12.1 The Mobile Robot Pioneer 3DX
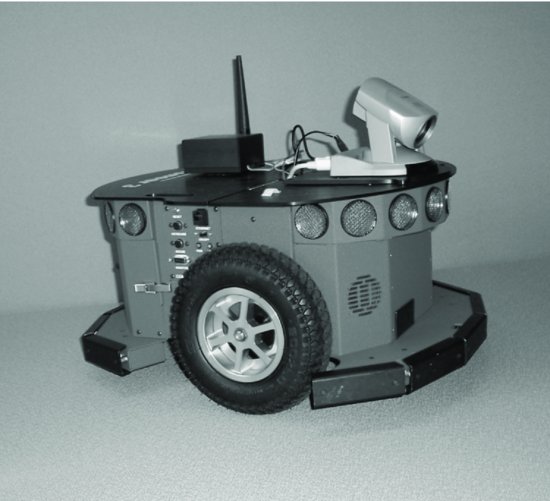
In the experiments described in this chapter mobile robot Pioneer-3DX (ActiveMedia, 2004), supplied by ActiveMedia Ltd, Amehirst, USA was used, Figure 12.1. It is equipped with an onboard real-time controller called ARCOS, computer (Pentium III CPU, 256 MB RAM), an electronic-driven motor, a high-resolution real-time camera (Cannon), digital compass, sixteen sonar disks and bumper sensors, and a wireless connection. The laser scanner mounted on the robot has a resolution of 10 in spatial terms and detectable range up to 10 000 mm. All devices, including the motor and the sensors are controlled by the software loaded on the onboard computer through the onboard real-time controller ARCOS.
Figure 12.1 Mobile robot Pioneer 3DX used in the experiments at Infolab21, Lancaster University, UK
The application algorithms ...
Get Autonomous Learning Systems: From Data Streams to Knowledge in Real-time now with the O’Reilly learning platform.
O’Reilly members experience books, live events, courses curated by job role, and more from O’Reilly and nearly 200 top publishers.

