
4 EVENT-BASED PLANNING AND CONTROL FOR MULTIROBOT COORDINATION
23
1,4
1.4
,.,q
0
<
8 100
5O
o
-50
-100
................................... i: ............................... 1
L ....
~
5 l o -15o 0
time
(sec)
..... c;...;.., ..................................................
....... 'i."! :', "'" ~
~ ,, ,
....
5
time (sec)
10
1.5
.~ 0.5
<
~ s 10
time (sec)
FIGURE 1.8
Straight line path tracking based on a time-optimal plan.
l __ ~ !
I ~ !
tl
~, 0.5 -.r ............... , .....................
,- o
;.rd
-1
[- J
o 5 o
time (sec)
solid line: X
dash line: Y
dot
line: Z
ability to handle an unexpected event. It significantly improves the safety and reliability of
the robotic system.
Figure 1.13 presents the results of a similar experiment for a circular path.
The preceding experimental results indicate that the performance of the event-based
planning and control scheme is comparable to that of the time-based motion planning and
control scheme.
It is even better.
The important point, however, is that it provides a natural
reference base for sensor-based planning and control.
4 EVENT-BASED PLANNING AND CONTROL FOR MULTIROBOT COORDINATION
4.1 Introduction
An important issue in multirobot systems is coordinated control. To achieve intelligence of
multirobot systems, it is essential to develop a proper planning and control scheme for
coordination.
Multirobot coordinated control has been a research subject for several years. Various
coordination schemes have been proposed. In [23] and [49], the master-slave coordination
scheme was proposed. The hybrid position-force control theory was extended to multiarm
coordinated control [36-38]. Control algorithms for multiarm object handling that take into
24 CHAPTER 1 / SENSOR-BASED PLANNING AND CONTROL FOR ROBOTIC SYSTEMS
500 i !
......
200
,,-- ~
e" "" .s"
'*" ,,. i
.0- .....
................ . .................................. ! ................
: i :
....... i ................. i ~ .............
..... :::.:-..-...,-,: ............... i .~ :.,'.'.-.....,., ....... i"
.......................
o
0
u -500
<
-1000
0 5 10 15 20
time (secs)
100 " ..................................
,,t,,
, ....] ..... ~ .... -~,-~ .........
,,
.,~ ,,,.,
: . ~,~
: i
'" ",! ",
0 '.": .......... :'~ ....... "
9 ~,
-100 ,
......
-200 ~
o 5 lO 15 2,9
time (s~s)
0
-2
0
200 ~
!
,. , . :
............... ~ .............. -. ............ § ............... ~ 100 .............. - ............... - ................. , ..........
i .S : : f~ ' ~ ' " Ji i :i
-100 ""~ ...........
*
................. : ................. i ............
-200
5 I0 15 20 0 5 I0 15
time (sees) time (s~s)
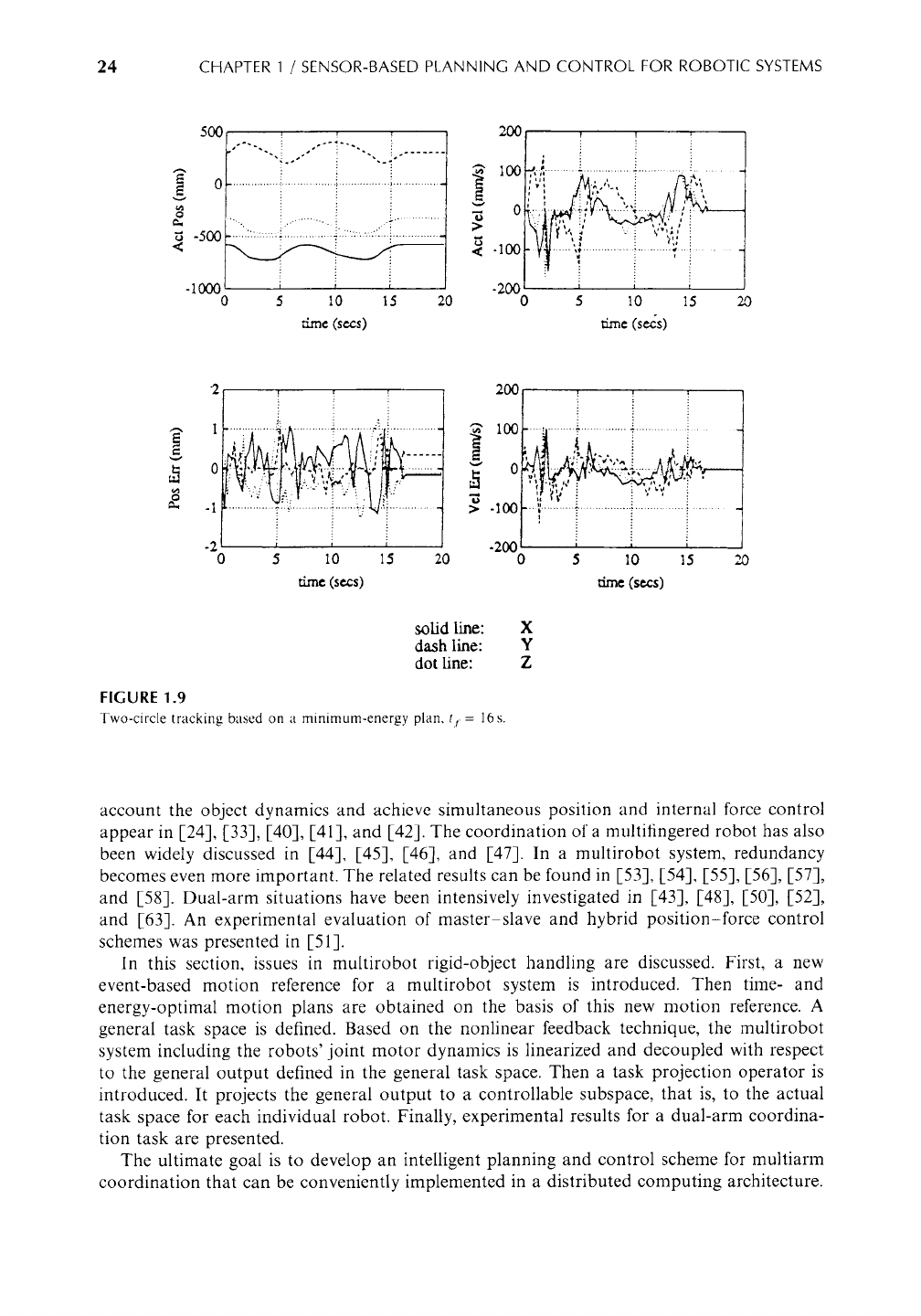
solid line: X
dash line: Y
dot
line: Z
FIGURE 1.9
Two-circle tracking based on a minimum-energy plan,
t r
=16s.
account the object dynamics and achieve simultaneous position and internal force control
appear in [24], [33], [40], [41], and [42]. The coordination of a multifingered robot has also
been widely discussed in [44], [-45], [-46], and [47]. In a multirobot system, redundancy
becomes even more important. The related results can be found in [53], [54], [55], [56], [57],
and [58]. Dual-arm situations have been intensively investigated in 1-43], [48], [-50], [52],
and [63]. An experimental evaluation of master-slave and hybrid position-force control
schemes was presented in [51].
In this section, issues in multirobot rigid-object handling are discussed. First, a new
event-based motion reference for a multirobot system is introduced. Then time- and
energy-optimal motion plans are obtained on the basis of this new motion reference. A
general task space is defined. Based on the nonlinear feedback technique, the multirobot
system including the robots' joint motor dynamics is linearized and decoupled with respect
to the general output defined in the general task space. Then a task projection operator is
introduced. It projects the general output to a controllable subspace, that is, to the actual
task space for each individual robot. Finally, experimental results for a dual-arm coordina-
tion task are presented.
The ultimate goal is to develop an intelligent planning and control scheme for multiarm
coordination that can be conveniently implemented in a distributed computing architecture.
Get Control in Robotics and Automation now with the O’Reilly learning platform.
O’Reilly members experience books, live events, courses curated by job role, and more from O’Reilly and nearly 200 top publishers.

