Chapter 11. Common Feedback Architectures
Sometimes a simple feedback loop is not enough. There are situations that require a combination of control elements, or even extensions beyond closed-loop feedback control. In this chapter, we will discuss some commonly occurring problems and their standard solutions.
For reference, the most general form of the basic, “textbook” control loop is shown in Figure 11-1. In addition to the familiar elements (the controller K, the plant H, and the optional return filter G), this graph also shows explicitly how disturbances can be included in a block diagram.
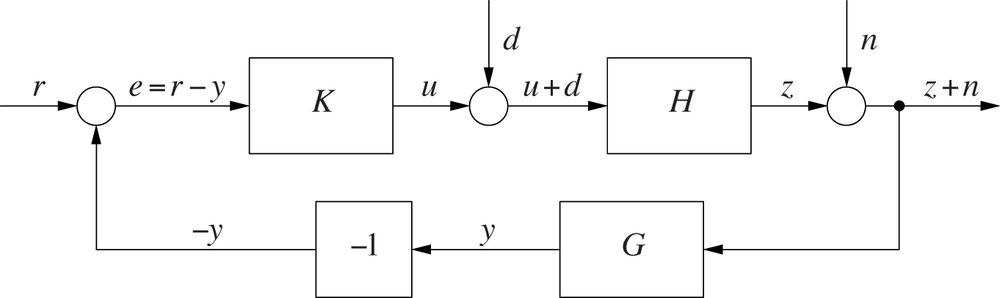
Also shown are disturbances entering the control loop. Generally, all effects that tend to drive the system away from its desired operating point are considered disturbances. Disturbances arising within the controlled plant or system are called load disturbances (because they arise within the “load” that is driven by the controller); disturbances that result from imperfections in the sensors used to observe the plant output are called measurement noise.
In the figure, measurement noise is shown as an external signal n being added to the plant output. The load disturbance d is modeled as affecting the plant input u, but in a way that is not observable by us. This is a modeling idealization; ...
Get Feedback Control for Computer Systems now with the O’Reilly learning platform.
O’Reilly members experience books, live events, courses curated by job role, and more from O’Reilly and nearly 200 top publishers.

