7.5. EXAMPLE FOR THE DESIGN OF A SECOND-ORDER CONTROL SYSTEM
In this section we consider the design and resulting performance of the second-order system by means of cascade and minor-loop rate-feedback techniques. This problem is useful in unifying concepts which were introduced in Chapters 4, 5, and 6, together with the design techniques illustrated in this chapter.
Let us consider the second-order system illustrated in Figure 7.18a. We will assume that the original forward-loop transfer function G0(s) is given by
![]()
The closed-loop transfer function, C(s)/R(s), is given by
![]()
or
![]()
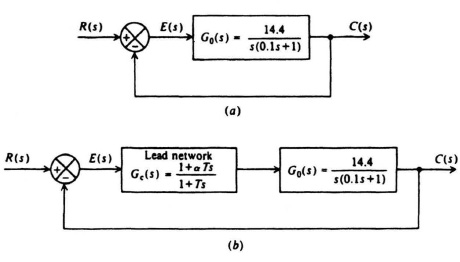
Figure 7.18 Design of a second-order system.
Comparing Eqs. (4.3) and (7.44), we observe that the undamped natural frequency ωn and damping ratio ζ of the system are given by
![]()
and
ζ = 0.417.
If the system is subjected to a unit step input, the transient response will have the form shown in Figure 4.4 (interpolate between ζ = 0.4 and ζ = 0.6). The maximum percent overshoot can be obtained from Eq. (4.33) and is ...
Get Modern Control System Theory and Design, 2nd Edition now with the O’Reilly learning platform.
O’Reilly members experience books, live events, courses curated by job role, and more from O’Reilly and nearly 200 top publishers.

