12.3 Delay Compensation Method
A simple solution to compensate this delay is to take into account the calculation time and apply the selected switching state after the next sampling instant. In this way, the control algorithm is modified as follows:
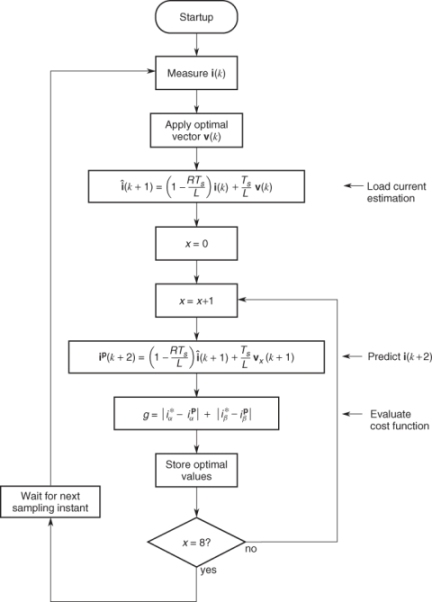
The predictive control algorithm with delay compensation can also be represented as the flowchart presented in Figure 12.5. Compared to the original control algorithm shown in Figure 12.2, application of the new voltage vector is moved to the beginning, and the estimation of the currents at time tk+1 is added. Note that the estimation of the currents increases the calculation time, but only marginally because it must be calculated only once.
Figure 12.5 Flowchart of the predictive current control with delay compensation
The operation of the predictive control with compensation delay is shown in Figure 12.6. Here, the measured currents and the applied switching state at time tk are used in ...
Get Predictive Control of Power Converters and Electrical Drives now with the O’Reilly learning platform.
O’Reilly members experience books, live events, courses curated by job role, and more from O’Reilly and nearly 200 top publishers.

