Appendix BDetermination of the Maximum Error for Pole Placement for a Nonlinear Third-Order Process
Let us consider the process (S) for which the evolution is described by equation:
[B.1]
with
[B.2]
[B.3]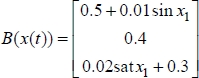
and
[B.4]
with
[B.5]
By linearizing the system without uncertainties around the operating point (x0 = 0), we obtain:
[B.6]
with
[B.7]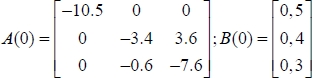
The characteristic polynomial of the system is:
[B.8]
such that:
[B.9]
With the base change defined by matrix Pc:
[B.10]
by letting
[B.11]
[B.12]
we obtain a canonical ...
Get Process Control Design for Industrial Applications now with the O’Reilly learning platform.
O’Reilly members experience books, live events, courses curated by job role, and more from O’Reilly and nearly 200 top publishers.

