A basic walking motion
Your robot is poised to walk, however, you first have to get a leg off the ground. Of course, that is easy enough; if you simply lift the leg by changing the angle of the knee joint, your leg can get off the ground. You may also want to change the angle of the front to back ankle; this will allow you to lift the leg without raising it quite as high.
However, you'll have a problem if you change just these two servos; as you lift the leg, your robot will fall over. This is due to a simple principle called the center of gravity. When your robot is at rest, your center of gravity looks like this:
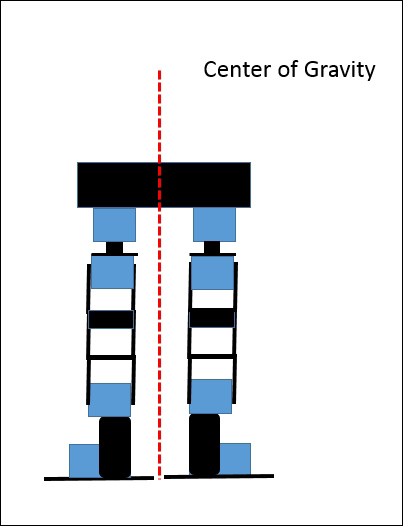
It is clear that if you lift a leg, ...
Get Raspberry Pi: Amazing Projects from Scratch now with the O’Reilly learning platform.
O’Reilly members experience books, live events, courses curated by job role, and more from O’Reilly and nearly 200 top publishers.

