4Roboterprojekt B
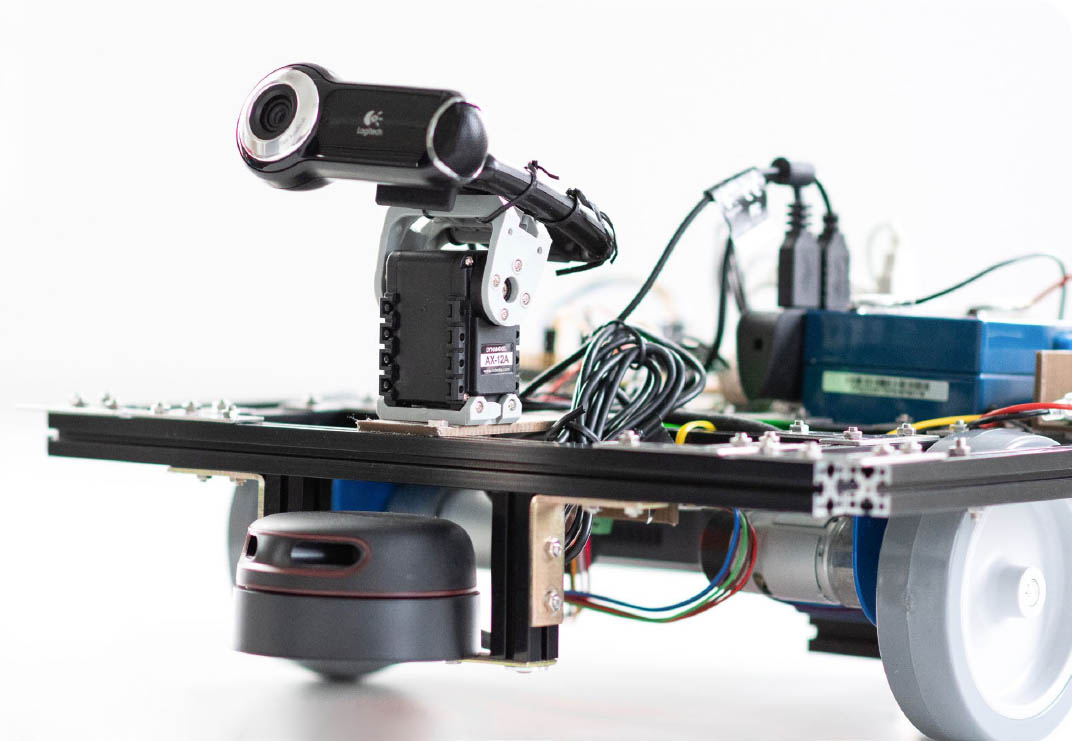
Das Roboterprojekt B basiert auf dem Roboterprojekt A und enthält zusätzlich eine motorisierte USB-Kamera. In diesem Projekt liegt der Schwerpunkt auf dem Thema Servo-Motoren. Mit dem hier gezeigten Motor lassen sich nicht nur Kameras bewegen. Ein beweglicher Arm, der aus mehr als einem Motor besteht, bedeutet in ROS letztlich nur Konfigurationsarbeit, sobald die Gelenke und Motoren miteinander verbunden sind. In diesem Projekt bereiten wir unseren Roboter für die Arbeit mit kinematischen Ketten vor, vergleichbar mit den Gliedmaßen eines Menschen. ROS bietet für umfangreiche kinematische Ketten das Programmpaket MoveIt!. Mit ...
Get Roboter mit ROS now with the O’Reilly learning platform.
O’Reilly members experience books, live events, courses curated by job role, and more from O’Reilly and nearly 200 top publishers.

