Mobile manipulators have been in the market for quite a while. Universities and research institutes initially began reusing their mobile robots and robot arms to improve dexterity. When ROS was gaining popularity in early 2007, PR2, a mobile manipulator (http://www.willowgarage.com/pages/pr2/overview) from Willow Garage (shown in the following photograph), was the testbed for testing a variety of ROS packages:
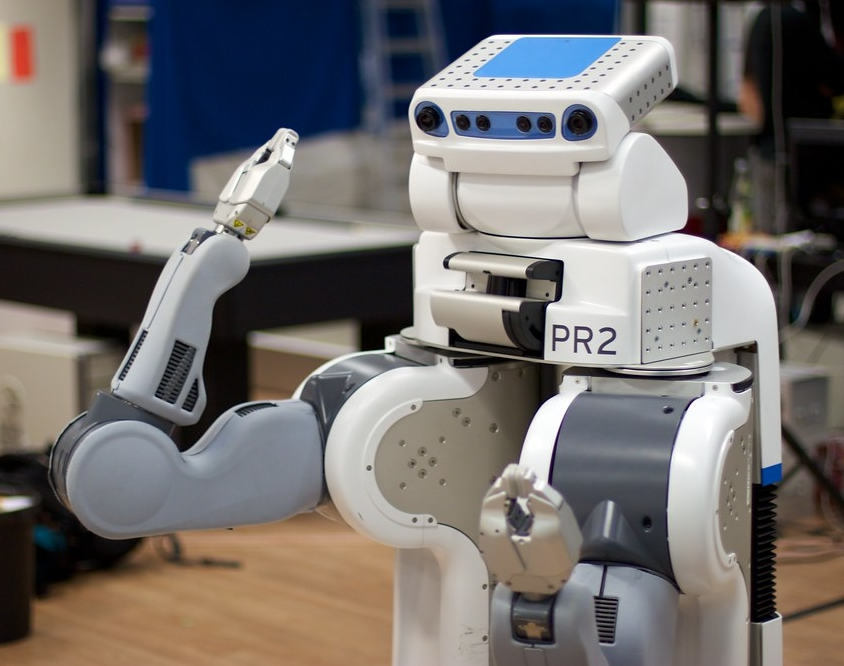
PR2 robot from OSRF (source: https://www.flickr.com/photos/jiuguangw/5136649984. Image by Jiuguang Wang. Licensed under Creative Commons CC-BY-SA 2.0: https://creativecommons.org/licenses/by-sa/2.0/legalcode) ...

