An illustrated introduction to the t-SNE algorithm
This post is an introduction to a popular dimensionality reduction algorithm: t-distributed stochastic neighbor embedding (t-SNE).
 T-sne plot
T-sne plot
In the Big Data era, data is not only becoming bigger and bigger; it is also becoming more and more complex. This translates into a spectacular increase of the dimensionality of the data. For example, the dimensionality of a set of images is the number of pixels in any image, which ranges from thousands to millions.
Computers have no problem processing that many dimensions. However, we humans are limited to three dimensions. Computers still need us (thankfully), so we often need ways to effectively visualize high-dimensional data before handing it over to the computer.

Learn faster. Dig deeper. See farther.
How can we possibly reduce the dimensionality of a dataset from an arbitrary number to two or three, which is what we’re doing when we visualize data on a screen?
The answer lies in the observation that many real-world datasets have a low intrinsic dimensionality, even though they’re embedded in a high-dimensional space. Imagine that you’re shooting a panoramic landscape with your camera, while rotating around yourself. We can consider every picture as a point in a 16,000,000-dimensional space (assuming a 16 megapixels camera). Yet, the set of pictures approximately lie in a three-dimensional space (yaw, pitch, roll). This low-dimensional space is embedded within the high-dimensional space in a complex, nonlinear way. Hidden in the data, this structure can only be recovered via specific mathematical methods.
This is the topic of manifold learning, also called nonlinear dimensionality reduction, a branch of machine learning (more specifically, unsupervised learning). It is still an active area of research today to develop algorithms that can automatically recover a hidden structure in a high-dimensional dataset.
This post is an introduction to a popular dimensonality reduction algorithm: t-distributed stochastic neighbor embedding (t-SNE). Developed by Laurens van der Maaten and Geoffrey Hinton (see the original paper here), this algorithm has been successfully applied to many real-world datasets. Here, we’ll follow the original paper and describe the key mathematical concepts of the method, when applied to a toy dataset (handwritten digits). We’ll use Python and the scikit-learn library.
Visualizing handwritten digits
Let’s first import a few libraries.
# That's an impressive list of imports.
import numpy as np
from numpy import linalg
from numpy.linalg import norm
from scipy.spatial.distance import squareform, pdist
# We import sklearn.
import sklearn
from sklearn.manifold import TSNE
from sklearn.datasets import load_digits
from sklearn.preprocessing import scale
# We'll hack a bit with the t-SNE code in sklearn 0.15.2.
from sklearn.metrics.pairwise import pairwise_distances
from sklearn.manifold.t_sne import (_joint_probabilities,
_kl_divergence)
from sklearn.utils.extmath import _ravel
# Random state.
RS = 20150101
# We'll use matplotlib for graphics.
import matplotlib.pyplot as plt
import matplotlib.patheffects as PathEffects
import matplotlib
%matplotlib inline
# We import seaborn to make nice plots.
import seaborn as sns
sns.set_style('darkgrid')
sns.set_palette('muted')
sns.set_context("notebook", font_scale=1.5,
rc={"lines.linewidth": 2.5})
# We'll generate an animation with matplotlib and moviepy.
from moviepy.video.io.bindings import mplfig_to_npimage
import moviepy.editor as mpy
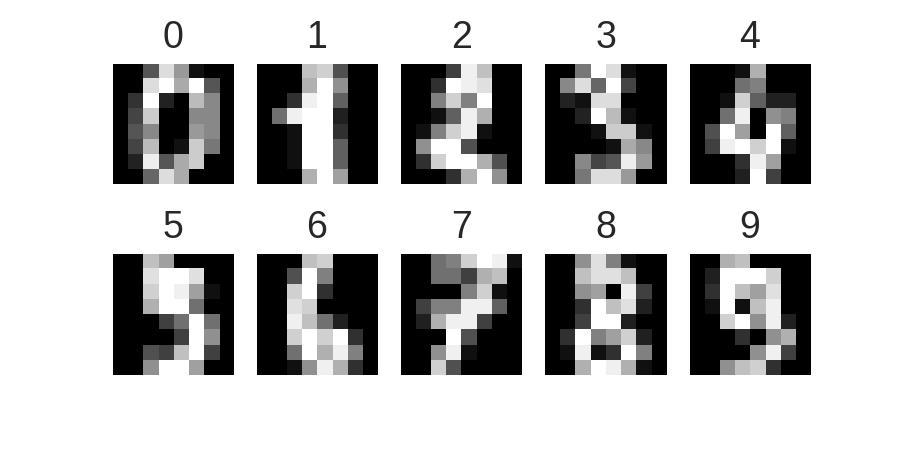
Now we load the classic handwritten digits datasets. It contains 1797 images with \(8*8=64\) pixels each.
digits = load_digits() digits.data.shape
print(digits['DESCR'])
Here are the images:
nrows, ncols = 2, 5
plt.figure(figsize=(6,3))
plt.gray()
for i in range(ncols * nrows):
ax = plt.subplot(nrows, ncols, i + 1)
ax.matshow(digits.images[i,...])
plt.xticks([]); plt.yticks([])
plt.title(digits.target[i])
plt.savefig('images/digits-generated.png', dpi=150)
Now let’s run the t-SNE algorithm on the dataset. It just takes one line with scikit-learn.
# We first reorder the data points according to the handwritten numbers.
X = np.vstack([digits.data[digits.target==i]
for i in range(10)])
y = np.hstack([digits.target[digits.target==i]
for i in range(10)])
digits_proj = TSNE(random_state=RS).fit_transform(X)
Here is a utility function used to display the transformed dataset. The color of each point refers to the actual digit (of course, this information was not used by the dimensionality reduction algorithm).
def scatter(x, colors):
# We choose a color palette with seaborn.
palette = np.array(sns.color_palette("hls", 10))
# We create a scatter plot.
f = plt.figure(figsize=(8, 8))
ax = plt.subplot(aspect='equal')
sc = ax.scatter(x[:,0], x[:,1], lw=0, s=40,
c=palette[colors.astype(np.int)])
plt.xlim(-25, 25)
plt.ylim(-25, 25)
ax.axis('off')
ax.axis('tight')
# We add the labels for each digit.
txts = []
for i in range(10):
# Position of each label.
xtext, ytext = np.median(x[colors == i, :], axis=0)
txt = ax.text(xtext, ytext, str(i), fontsize=24)
txt.set_path_effects([
PathEffects.Stroke(linewidth=5, foreground="w"),
PathEffects.Normal()])
txts.append(txt)
return f, ax, sc, txts
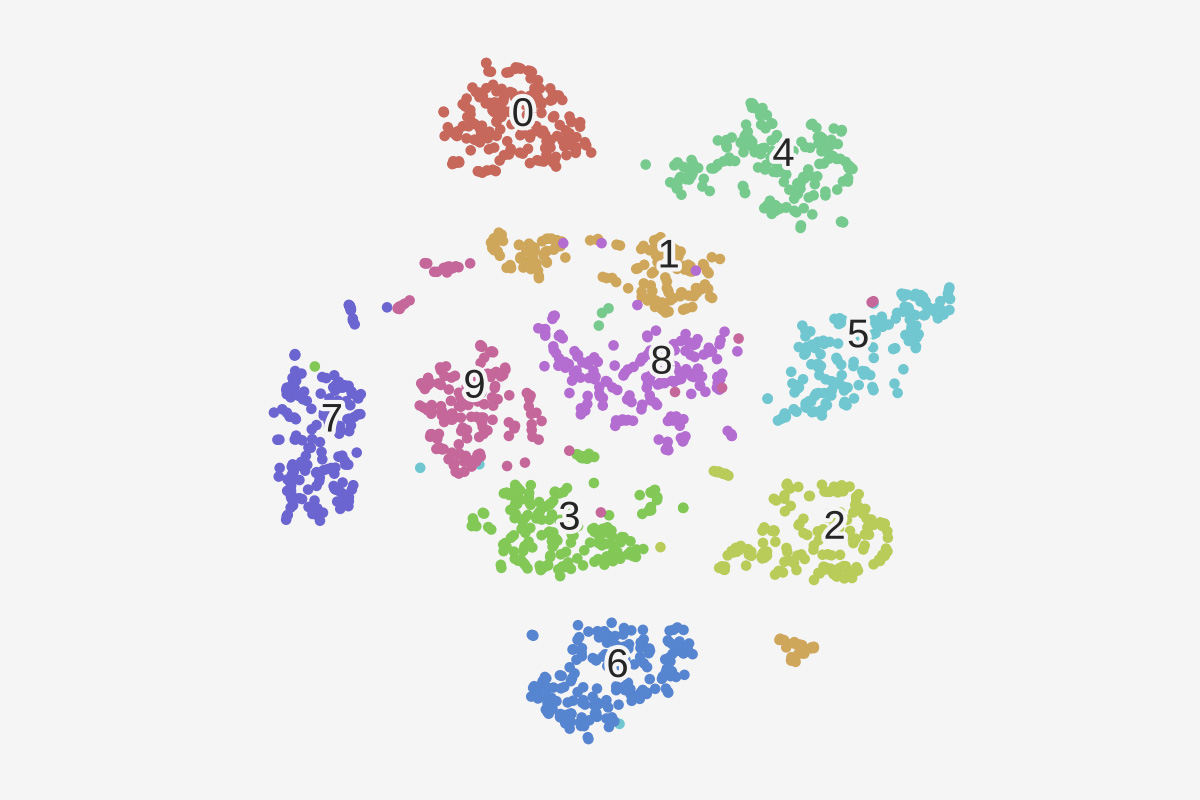
Here is the result.
scatter(digits_proj, y)
plt.savefig('images/digits_tsne-generated.png', dpi=120)
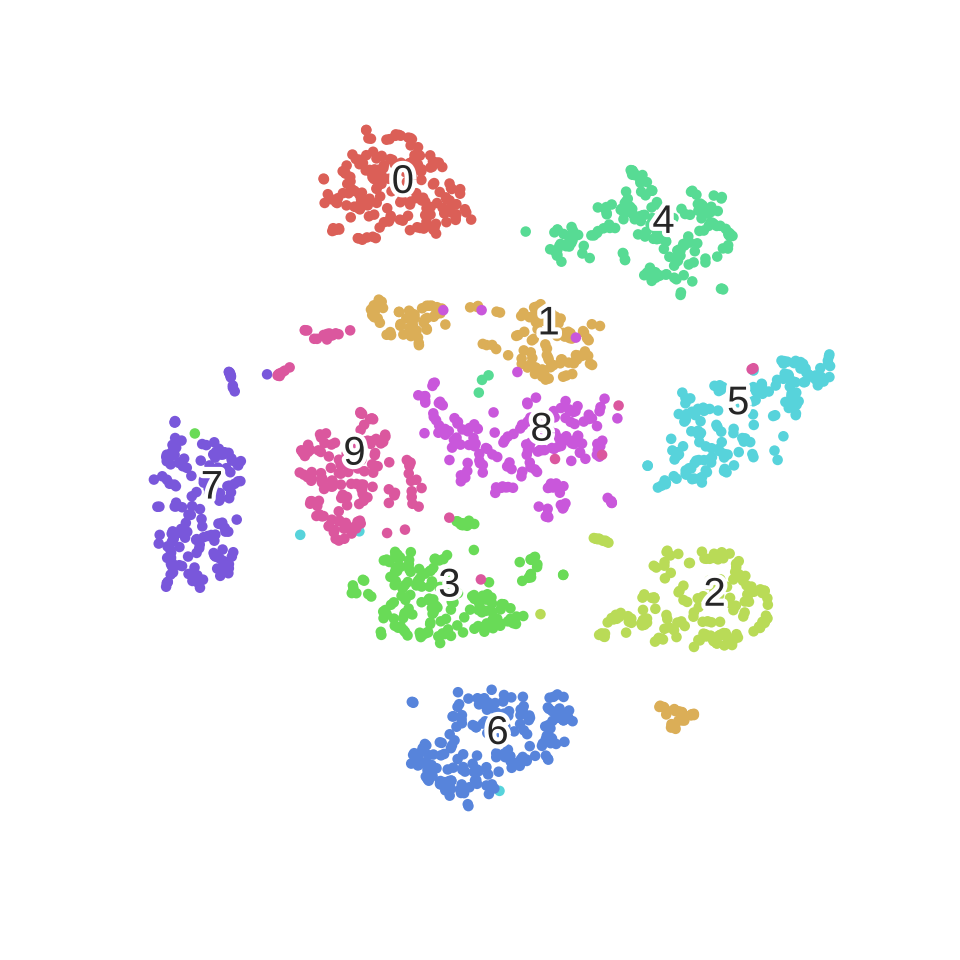
We observe that the images corresponding to the different digits are clearly separated into different clusters of points.
Mathematical framework
Let’s explain how the algorithm works. First, a few definitions.
A data point is a point \(x_i\) in the original data space \(\mathbf{R}^D\), where \(D=64\) is the dimensionality of the data space. Every point is an image of a handwritten digit here. There are \(N=1797\) points.
A map point is a point \(y_i\) in the map space \(\mathbf{R}^2\). This space will contain our final representation of the dataset. There is a bijection between the data points and the map points: every map point represents one of the original images.
How do we choose the positions of the map points? We want to conserve the structure of the data. More specifically, if two data points are close together, we want the two corresponding map points to be close too. Let’s \(\left| x_i – x_j \right|\) be the Euclidean distance between two data points, and \(\left| y_i – y_j \right|\) the distance between the map points. We first define a conditional similarity between the two data points:
\(p_{j|i} = \frac{\exp\left(-\left| x_i – x_j\right|^2 \big/ 2\sigma_i^2\right)}{\displaystyle\sum_{k \neq i} \exp\left(-\left| x_i – x_k\right|^2 \big/ 2\sigma_i^2\right)}\)
This measures how close \(x_j\) is from \(x_i\), considering a Gaussian distribution around \(x_i\) with a given variance \(\sigma_i^2\). This variance is different for every point; it is chosen such that points in dense areas are given a smaller variance than points in sparse areas. The original paper details how this variance is computed exactly.
Now, we define the similarity as a symmetrized version of the conditional similarity:
\(p_{ij} = \frac{p_{j|i} + p_{i|j}}{2N}\)
We obtain a similarity matrix for our original dataset. What does this matrix look like?
Similarity matrix
The following function computes the similarity with a constant \(\sigma\).
def _joint_probabilities_constant_sigma(D, sigma):
P = np.exp(-D**2/2 * sigma**2)
P /= np.sum(P, axis=1)
return P
We now compute the similarity with a \(\sigma_i\) depending on the data point (found via a binary search, according to the original t-SNE paper). This algorithm is implemented in the _joint_probabilities private function in scikit-learn’s code.
# Pairwise distances between all data points. D = pairwise_distances(X, squared=True) # Similarity with constant sigma. P_constant = _joint_probabilities_constant_sigma(D, .002) # Similarity with variable sigma. P_binary = _joint_probabilities(D, 30., False) # The output of this function needs to be reshaped to a square matrix. P_binary_s = squareform(P_binary)
We can now display the distance matrix of the data points, and the similarity matrix with both a constant and variable sigma.
plt.figure(figsize=(12, 4))
pal = sns.light_palette("blue", as_cmap=True)
plt.subplot(131)
plt.imshow(D[::10, ::10], interpolation='none', cmap=pal)
plt.axis('off')
plt.title("Distance matrix", fontdict={'fontsize': 16})
plt.subplot(132)
plt.imshow(P_constant[::10, ::10], interpolation='none', cmap=pal)
plt.axis('off')
plt.title("$p_{j|i}$ (constant $\sigma$)", fontdict={'fontsize': 16})
plt.subplot(133)
plt.imshow(P_binary_s[::10, ::10], interpolation='none', cmap=pal)
plt.axis('off')
plt.title("$p_{j|i}$ (variable $\sigma$)", fontdict={'fontsize': 16})
plt.savefig('images/similarity-generated.png', dpi=120)
We can already observe the 10 groups in the data, corresponding to the 10 numbers.
Let’s also define a similarity matrix for our map points.
\(q_{ij} = \frac{f(\left| x_i – x_j\right|)}{\displaystyle\sum_{k \neq i} f(\left| x_i – x_k\right|)} \quad \textrm{with} \quad f(z) = \frac{1}{1+z^2}\)
This is the same idea as for the data points, but with a different distribution (t-Student with one degree of freedom, or Cauchy distribution, instead of a Gaussian distribution). We’ll elaborate on this choice later.
Whereas the data similarity matrix \(\big(p_{ij}\big)\) is fixed, the map similarity matrix \(\big(q_{ij}\big)\) depends on the map points. What we want is for these two matrices to be as close as possible. This would mean that similar data points yield similar map points.
A physical analogy
Let’s assume that our map points are all connected with springs. The stiffness of a spring connecting points \(i\) and \(j\) depends on the mismatch between the similarity of the two data points and the similarity of the two map points, that is, \(p_{ij} – q_{ij}\). Now, we let the system evolve according to the laws of physics. If two map points are far apart while the data points are close, they are attracted together. If they are nearby while the data points are dissimilar, they are repelled.
The final mapping is obtained when the equilibrium is reached.
Algorithm
Remarkably, this physical analogy stems naturally from the mathematical algorithm. It corresponds to minimizing the Kullback-Leiber divergence between the two distributions \(\big(p_{ij}\big)\) and \(\big(q_{ij}\big)\):
\(KL(P||Q) = \sum_{i, j} p_{ij} \, \log \frac{p_{ij}}{q_{ij}}.\)
This measures the distance between our two similarity matrices.
To minimize this score, we perform a gradient descent. The gradient can be computed analytically:
\(\frac{\partial \, KL(P || Q)}{\partial y_i} = 4 \sum_j (p_{ij} – q_{ij}) g\left( \left| x_i – x_j\right| \right) u_{ij} \quad \textrm{where} \, g(z) = \frac{z}{1+z^2}.\)
Here, \(u_{ij}\) is a unit vector going from \(y_j\) to \(y_i\). This gradient expresses the sum of all spring forces applied to map point \(i\).
Let’s illustrate this process by creating an animation of the convergence. We’ll have to monkey-patch the internal _gradient_descent() function from scikit-learn’s t-SNE implementation in order to register the position of the map points at every iteration.
# This list will contain the positions of the map points at every iteration.
positions = []
def _gradient_descent(objective, p0, it, n_iter, n_iter_without_progress=30,
momentum=0.5, learning_rate=1000.0, min_gain=0.01,
min_grad_norm=1e-7, min_error_diff=1e-7, verbose=0,
args=[]):
# The documentation of this function can be found in scikit-learn's code.
p = p0.copy().ravel()
update = np.zeros_like(p)
gains = np.ones_like(p)
error = np.finfo(np.float).max
best_error = np.finfo(np.float).max
best_iter = 0
for i in range(it, n_iter):
# We save the current position.
positions.append(p.copy())
new_error, grad = objective(p, *args)
error_diff = np.abs(new_error - error)
error = new_error
grad_norm = linalg.norm(grad)
if error < best_error:
best_error = error
best_iter = i
elif i - best_iter > n_iter_without_progress:
break
if min_grad_norm >= grad_norm:
break
if min_error_diff >= error_diff:
break
inc = update * grad >= 0.0
dec = np.invert(inc)
gains[inc] += 0.05
gains[dec] *= 0.95
np.clip(gains, min_gain, np.inf)
grad *= gains
update = momentum * update - learning_rate * grad
p += update
return p, error, i
sklearn.manifold.t_sne._gradient_descent = _gradient_descent
Let’s run the algorithm again, but this time saving all intermediate positions.
X_proj = TSNE(random_state=RS).fit_transform(X)
X_iter = np.dstack(position.reshape(-1, 2)
for position in positions)
We create an animation using MoviePy.
f, ax, sc, txts = scatter(X_iter[..., -1], y)
def make_frame_mpl(t):
i = int(t*40)
x = X_iter[..., i]
sc.set_offsets(x)
for j, txt in zip(range(10), txts):
xtext, ytext = np.median(x[y == j, :], axis=0)
txt.set_x(xtext)
txt.set_y(ytext)
return mplfig_to_npimage(f)
animation = mpy.VideoClip(make_frame_mpl,
duration=X_iter.shape[2]/40.)
animation.write_gif("https://www.oreilly.com/content/wp-content/uploads/sites/2/2019/06/animation-94a2c1ff.gif", fps=20)
We can clearly observe the different phases of the optimization, as described in the original paper.
Let’s also create an animation of the similarity matrix of the map points. We’ll observe that it’s getting closer and closer to the similarity matrix of the data points.
n = 1. / (pdist(X_iter[..., -1], "sqeuclidean") + 1)
Q = n / (2.0 * np.sum(n))
Q = squareform(Q)
f = plt.figure(figsize=(6, 6))
ax = plt.subplot(aspect='equal')
im = ax.imshow(Q, interpolation='none', cmap=pal)
plt.axis('tight')
plt.axis('off')
def make_frame_mpl(t):
i = int(t*40)
n = 1. / (pdist(X_iter[..., i], "sqeuclidean") + 1)
Q = n / (2.0 * np.sum(n))
Q = squareform(Q)
im.set_data(Q)
return mplfig_to_npimage(f)
animation = mpy.VideoClip(make_frame_mpl,
duration=X_iter.shape[2]/40.)
animation.write_gif("https://www.oreilly.com/content/wp-content/uploads/sites/2/2019/06/animation_matrix-da2d5f1b-1.gif", fps=20)
The t-Student distribution
Let’s now explain the choice of the t-Student distribution for the map points, while a normal distribution is used for the data points. It is well known that the volume of the \(N\)-dimensional ball of radius \(r\) scales as \(r^N\). When \(N\) is large, if we pick random points uniformly in the ball, most points will be close to the surface, and very few will be near the center.
This is illustrated by the following simulation, showing the distribution of the distances of these points, for different dimensions.
npoints = 1000
plt.figure(figsize=(15, 4))
for i, D in enumerate((2, 5, 10)):
# Normally distributed points.
u = np.random.randn(npoints, D)
# Now on the sphere.
u /= norm(u, axis=1)[:, None]
# Uniform radius.
r = np.random.rand(npoints, 1)
# Uniformly within the ball.
points = u * r**(1./D)
# Plot.
ax = plt.subplot(1, 3, i+1)
ax.set_xlabel('Ball radius')
if i == 0:
ax.set_ylabel('Distance from origin')
ax.hist(norm(points, axis=1),
bins=np.linspace(0., 1., 50))
ax.set_title('D=%d' % D, loc='left')
plt.savefig('images/spheres-generated.png', dpi=100, bbox_inches='tight')
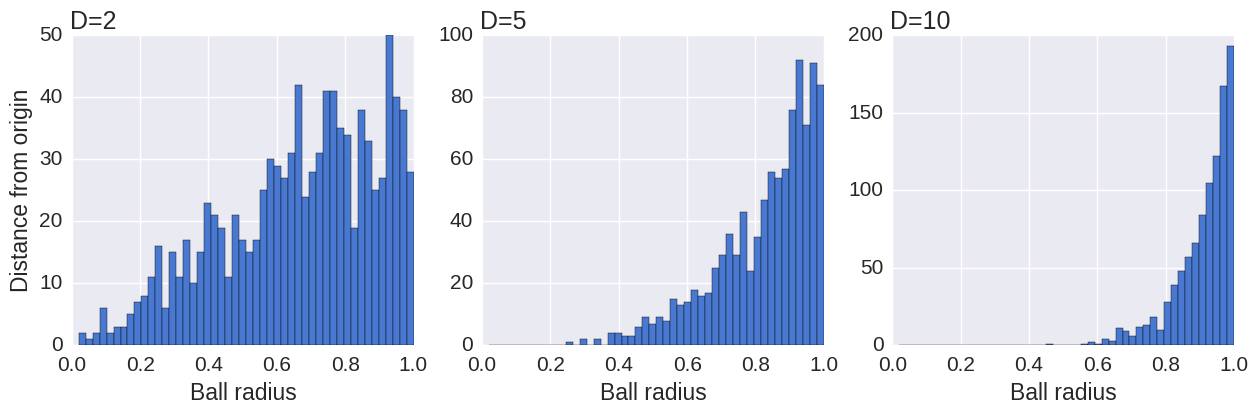
When reducing the dimensionality of a dataset, if we used the same Gaussian distribution for the data points and the map points, we would get an imbalance in the distribution of the distances of a point’s neighbors. This is because the distribution of the distances is so different between a high-dimensional space and a low-dimensional space. Yet, the algorithm tries to reproduce the same distances in the two spaces. This imbalance would lead to an excess of attraction forces and a sometimes unappealing mapping. This is actually what happens in the original SNE algorithm, by Hinton and Roweis (2002).
The t-SNE algorithm works around this problem by using a t-Student with one degree of freedom (or Cauchy) distribution for the map points. This distribution has a much heavier tail than the Gaussian distribution, which compensates the original imbalance. For a given similarity between two data points, the two corresponding map points will need to be much further apart in order for their similarity to match the data similarity. This can be seen in the following plot.
z = np.linspace(0., 5., 1000)
gauss = np.exp(-z**2)
cauchy = 1/(1+z**2)
plt.plot(z, gauss, label='Gaussian distribution')
plt.plot(z, cauchy, label='Cauchy distribution')
plt.legend()
plt.savefig('images/distributions-generated.png', dpi=100)
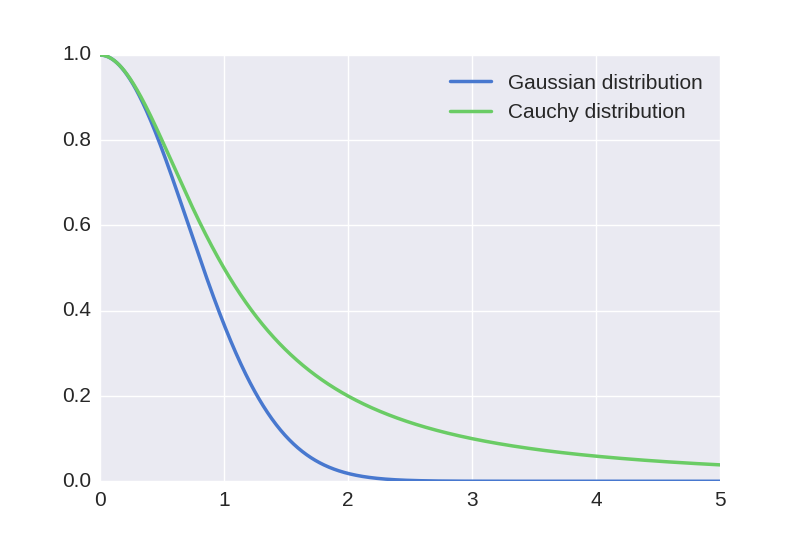
Using this distribution leads to more effective data visualizations, where clusters of points are more distinctly separated.
Conclusion
The t-SNE algorithm provides an effective method to visualize a complex dataset. It successfully uncovers hidden structures in the data, exposing natural clusters and smooth nonlinear variations along the dimensions. It has been implemented in many languages, including Python, and it can be easily used thanks to the scikit-learn library.
The references below describe some optimizations and improvements that can be made to the algorithm and implementations. In particular, the algorithm described here is quadratic in the number of samples, which makes it unscalable to large datasets. One could for example obtain an \(O(N \log N)\) complexity by using the Barnes-Hut algorithm to accelerate the N-body simulation via a quadtree or an octree.