7 Features
Given an edge image, it is often impossible to determine locally the movement of the edge from one frame to the next frame in an image sequence (see Figure 7.1). This is caused to a large extent by the ambiguity of the match (i.e. it is not apparent which edge point in the next image the current edge point maps to), but there are many different reasons why it is difficult to associate edge points from one frame to the next. Even in the simple example shown there are many different possible interpretations. The red object could be expanding in size or equally it could be moving in a variety of directions as illustrated. For real imagery we have extra possibilities caused by the objects being three-dimensional with a whole variety of different rotations, translations and deformations possible.
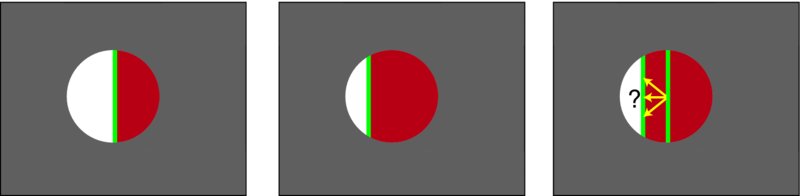
Figure 7.1 The Aperture Problem exemplifies the problem of local processing. In the images shown we are considering just the pixels inside the hole in the grey area. Two images are shown from a synthetic image sequence (left) and (centre) with the edge points marked in green, along with some of the possible linkages for one of the (green) edge points (right)
To overcome this problem, a common approach in computer vision is to instead make use of corners, image features or interest points (these terms are used almost interchangeably). Technically a corner is the intersection ...
Get A Practical Introduction to Computer Vision with OpenCV now with the O’Reilly learning platform.
O’Reilly members experience books, live events, courses curated by job role, and more from O’Reilly and nearly 200 top publishers.

