1Applications: Speed and Torque Control
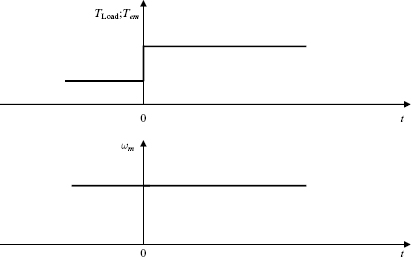
There are many electromechanical systems where it is important to precisely control their torque, speed, and position. Many of these, such as elevators in high-rise buildings, we use on daily basis. Many others operate behind the scene, such as mechanical robots in automated factories, which are crucial for industrial competitiveness. Even in general-purpose applications of adjustable-speed drives, such as pumps and compressors systems, it is possible to control adjustable-speed drives in a way to increase their energy efficiency. Advanced electric drives are also needed in wind-electric systems to generate electricity at variable speed, as described in Appendix 1-A in the accompanying website. Hybrid-electric and electric vehicles represent an important application of advanced electric drives in the immediate future. In most of these applications, increasing efficiency requires producing maximum torque per ampere, as will be explained in this book. It also requires controlling the electromagnetic toque, as quickly and as precisely as possible, illustrated in Fig. 1-1, where the load torque TLoad may take a step-jump in time, in response to which the electromagnetic torque produced by the machine Tem must also take a step-jump if the speed ωm of the load is to remain constant.
Get Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB/Simulink now with the O’Reilly learning platform.
O’Reilly members experience books, live events, courses curated by job role, and more from O’Reilly and nearly 200 top publishers.

