11Switched-Reluctance Motor (SRM) Drives
11-1 Introduction
In the previous course [1], we have studied variable reluctance stepper motors, whose construction requires a salient stator and a salient rotor. Stepper motors are generally used for position control in an open-loop manner, where by counting the number of electrical pulses supplied and knowing the step angle of the motor, it is possible to rotate the shaft by a desired angle without any feedback. In contrast, switched-reluctance motor (SRM) drives, also doubly salient in construction, are intended to provide continuous rotation and compete with induction motor and brushless dc motor drives in certain applications, such as washing machines and automobiles, with many more applications being contemplated.
In this chapter, we will briefly look at the basic principles of SRM operation and how it is possible to control them in an encoderless manner.
11-2 Switched-Reluctance Motor
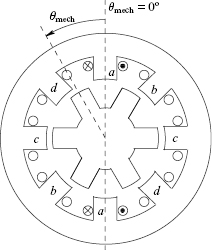
Cross-section of a four-phase SRM is shown in Fig. 11-1, which looks identical to a variable-reluctance stepper motor. It has a four-phase winding on the stator. In order to achieve a continuous rotation, each phase winding is excited by an appropriate current at an appropriate rotor angle, as well as de-excited at a proper angle. For rotating it in the counterclockwise direction, the excitation sequence is a-b-c-d.
Get Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB/Simulink now with the O’Reilly learning platform.
O’Reilly members experience books, live events, courses curated by job role, and more from O’Reilly and nearly 200 top publishers.

