C H A P T E R 8
Kinect-Driven Drawing Robot
In this chapter, you will be using some of the techniques that you learned in previous chapters and exploring them further with a different goal in mind. You will be using servos to build a robotic arm that is able to draw algorithmic patterns on paper (Figures 8-1 and 8-2).
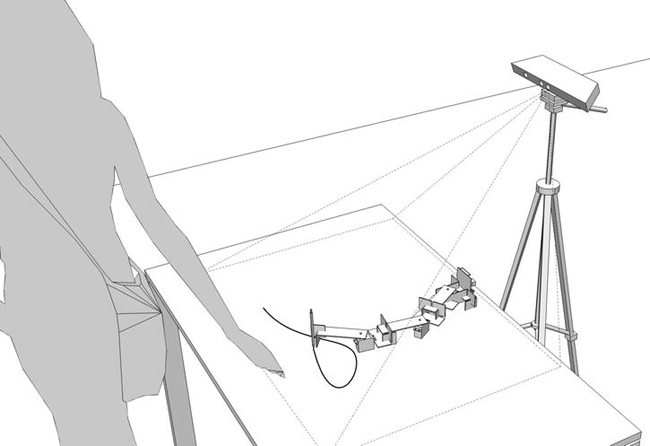
Figure 8-1. Visualization of the installation
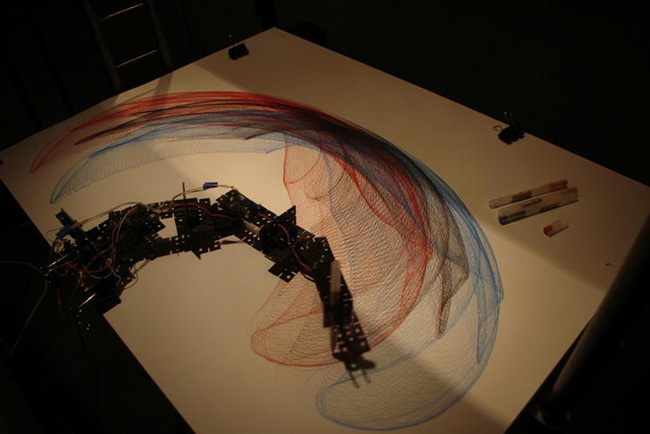
Figure 8-2. Drawing robot in action
Why an arm and not a two-axis pen plotter? Actually, an arm-like robot is simpler to construct and much easier to code. ...
Get Arduino and Kinect Projects: Design, Build, Blow Their Minds now with the O’Reilly learning platform.
O’Reilly members experience books, live events, courses curated by job role, and more from O’Reilly and nearly 200 top publishers.

