Chapter 1Computer Vision in Vehicles
Reinhard Klette
School of Engineering, Computer and Mathematical Sciences, Auckland University of Technology, Auckland, New Zealand
This chapter is a brief introduction to academic aspects of computer vision in vehicles. It briefly summarizes basic notation and definitions used in computer vision. The chapter discusses a few visual tasks as of relevance for vehicle control and environment understanding.
1.1 Adaptive Computer Vision for Vehicles
Computer vision designs solutions for understanding the real world by using cameras. See Rosenfeld (1969), Horn (1986), Hartley and Zisserman (2003), or Klette (2014) for examples of monographs or textbooks on computer vision.
Computer vision operates today in vehicles including cars, trucks, airplanes, unmanned aerial vehicles (UAVs) such as multi-copters (see Figure 1.1 for a quadcopter), satellites, or even autonomous driving rovers on the Moon or Mars.
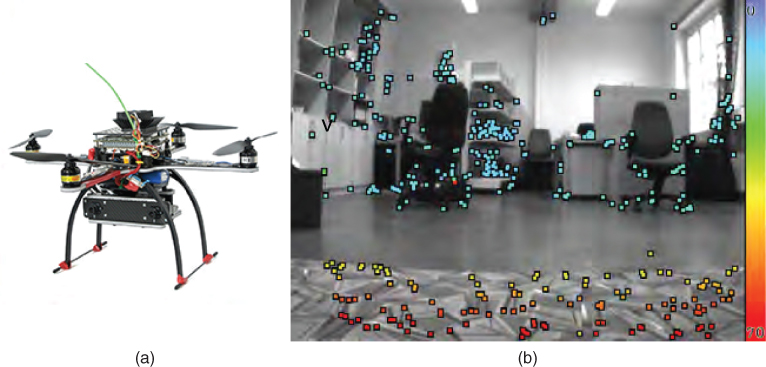
Figure 1.1 (a) Quadcopter. (b) Corners detected from a flying quadcopter using a modified FAST feature detector.
Courtesy of Konstantin Schauwecker
In our context, the ego-vehicle is that vehicle where the computer vision system operates in; ego-motion describes the ego-vehicle's motion in the real world.
1.1.1 Applications
Computer vision solutions are today in use in manned vehicles for improved safety or comfort, in autonomous vehicles (e.g., ...
Get Computer Vision in Vehicle Technology now with the O’Reilly learning platform.
O’Reilly members experience books, live events, courses curated by job role, and more from O’Reilly and nearly 200 top publishers.

