October 2006
Intermediate to advanced
369 pages
8h 11m
English
Let us look at a physical system regulated by a linear differential equation of the 1st order, as is usually the case with RC and LR type filters:
![]()
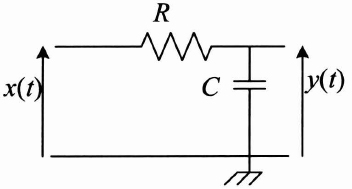
Figure 3.23. RC filter
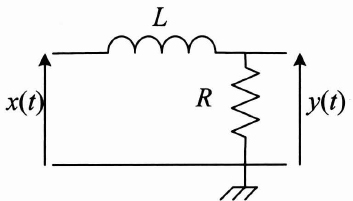
Figure 3.24. LR filter
The transmittance of the system, i.e. ![]() , where Y(s) designates the Laplace transform1 of y(t) and is expressed by:
, where Y(s) designates the Laplace transform1 of y(t) and is expressed by:
![]()
In taking s = jω where ω = 2πf designates the angular frequency, we obtain:

where K is called the static gain.
With RC and LR filters, the time constant is worth, respectively, τ = RC and ![]() and K = 1.
and K = 1.
We characterize the system by its impulse response or its indicial response. When x(t) = δ(t), X(s) = 1.
From there:
and if we refer to a Laplace transform table, ...
Read now
Unlock full access






