The training process for 3D-GAN is similar to the process for the vanilla GAN. This can be seen in the following diagram:
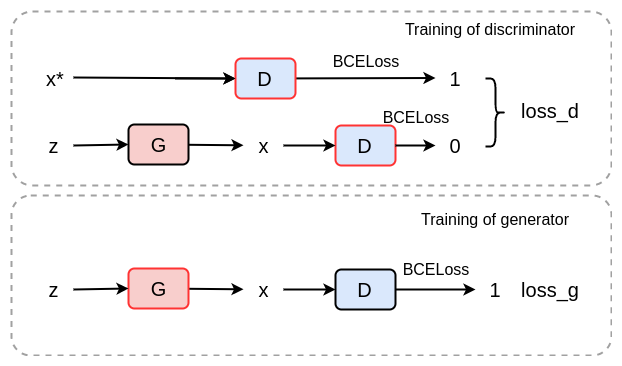
The training process of 3D-GAN. Here, x* denotes real data, x denotes fake data, and z denotes the latent vector. The networks whose parameters are updated are marked with red boundaries.
First, the discriminator network is trained to recognize the real 3D point cloud as true data and the synthesized point cloud that's generated by the generator network as fake data. BCE loss (nn.BCELoss) is used as the loss function for the discriminator network. Then, the generator network is trained by forcing the discriminator ...

