
Key words: automatic speech, recognition, robust speech recognition, speech en-
hancement, robust speech feature, stochastic matching, model combination, speaker
adaptation, microphone array.
6.1 INTRODUCTION
Ambient intelligence is the vision of a technology that will become invisibly embed-
ded in our surroundings, enabled by simple and effortless interactions, context sen-
sitive, and adaptive to users [1]. Automatic speech recognition is a core component
that allows high-quality information access for ambient intelligence. However, it is a
difficult problem and one with a long history that began with initial papers appear-
ing in the 1950s [2, 3]. Thanks to the significant progress made in recent years in
this area [4, 5], speech recognitio n technology, once confined to research labora-
tories, is now applied to some real-world applications, and a number of commercial
speech recognition products (from Nuance, IBM, Microsoft, Nokia, etc.) are on the
market. For example, with automatic voice mail transcription by speech recognition,
a user can have a quick view of her voice mail without having to listen to it. Other
applications include voice dialing on embedded speech recognition systems.
The main factors that have made speech recognition possible are advance s in dig-
ital signal processing (DSP) and stochastic modeling algorithms. Signal processing
techniques are important for extracting reliable acoustic features from the speech
signal, and stochastic modeling algorithms are useful for representing speech utter-
ances in the form of efficient models, such as hidden Markov models (HMMs), which
simplify the speech recognition task. Other factors responsible for the commercial
success of speech recognition technology include the availability of fast processor s
(in the form of DSP chips) and high-density memories at relatively low cost.
With the current state of the art in speech recognition technology, it is relatively
easy to accomplish complex speech recognition tasks reasonably well in controlled
laboratory environments. For example, it is now possible to achieve less than a 0.4%
string error rate in a speaker-independent digit recognition task [6]. Even continuous
speech from many speakers and from a vocabulary of 5000 words can be recognized
with a word error rate below 4% [7]. This high level of performance is achievable
only when the training and the test data match. When there is a mismatch between
training and test data, performance degrades drastically.
Mismatch between training and test sets may occur because of changes in acoustic
environments (background, channel mismatch, etc.), speakers, task domains, speaking
styles, and the like [8]. Each of these sources of mismatch can cause severe distortion
in recognition performance for ambient intelligence. For example, a continuous speech
recognition system with a 5000-word vocabulary raised its word error rate from 15%
in clean conditions to 69% in 10-dB to 20-dB signal-to-noise ratio (SNR) conditions
[9, 10]. Similar degradations in recognition performance due to channel mismatch
are observed. The recognition accuracy of the SPHINX speech recognition system
on a speaker-independent alphanumeric task dropped from 85% to 20% correct
when the close-talking Sennheiser microphone used in training was replaced by the
136 CHAPTER 6 Robust Speech Recognition Under Noisy Ambient Conditions
omnidirectional Crown desktop microphone [11]. Similarly, when a digital recogni-
tion system is trained for a particular speaker, its accuracy can be easily 100%, but its
performance degrades to as low as 50% when it is tested on a new speaker.
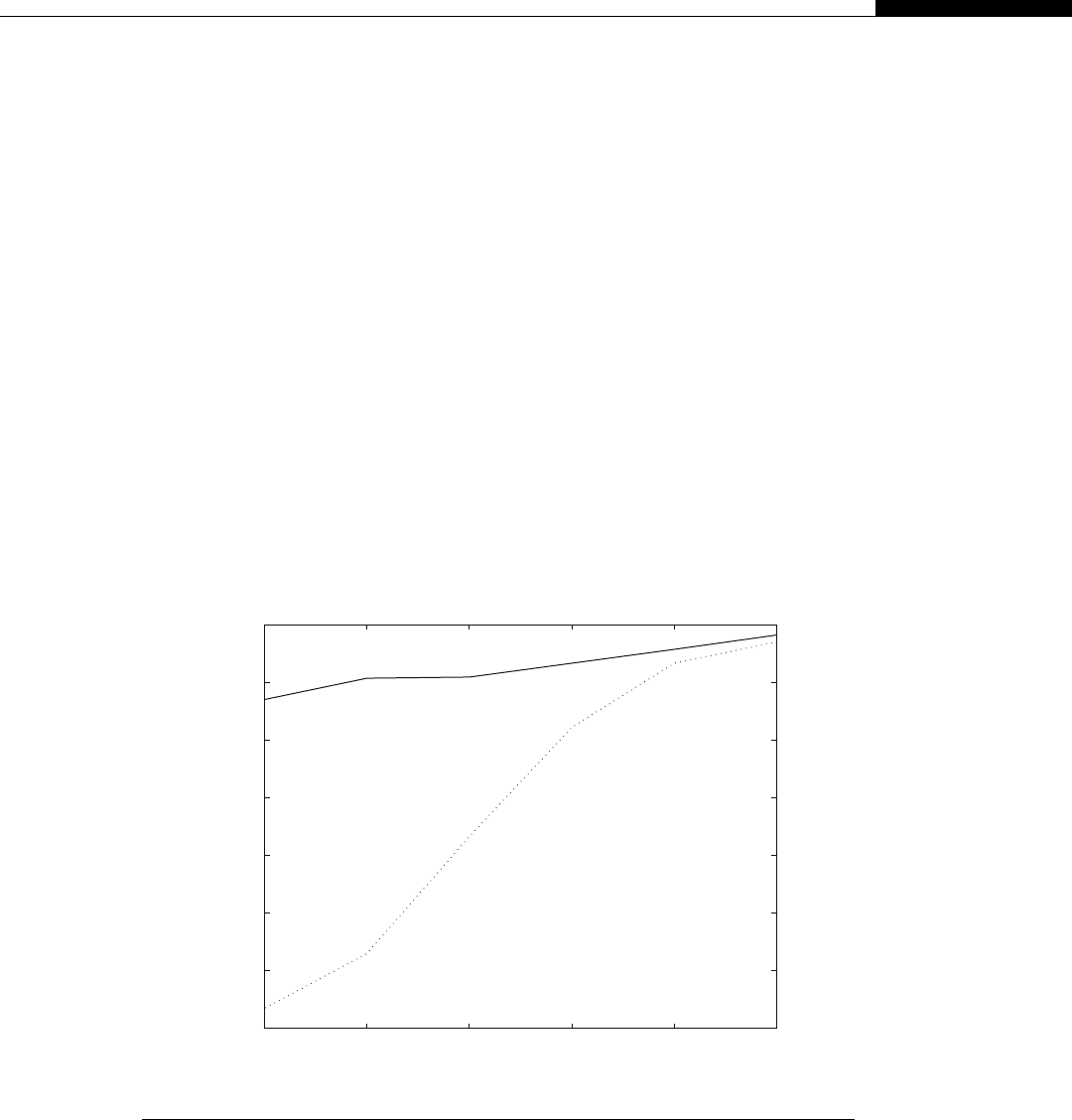
To understand the effect of mismatch between training and test conditions, we
show in Figure 6.1 the performance of a speaker-dependent, isolated-word recogni-
tion system on speech corrupted by additive white noise. The recognition system
uses a nine-word English e-set alphabet vocabulary where each word is represented
by a single-mixture continuous Gaussian density HMM with five states. The figure
shows recognition accuracy as a function of the SNR of the test speech under
(1) mismatched conditions where the recognition system is trained on clean speech
and tested on noisy speech, and (2) matched conditions where the training and the
test speech data have the same SNR.
It can be seen from Figure 6.1 that the additive noise causes a drastic degradation
in recognition performance under the mismatched conditions; with the matched
conditions, however, the degradation is moderate and graceful. It may be noted here
that if the SNR becomes too low (such as 10 dB), the result is very poor recogni-
tion performance even when the system operates under matched noise conditions.
This is because the signal is completely swamped by noise and no useful information
can be extracted from it during training or in testing.
10 15 20 25 30 35
30
40
50
60
70
80
90
100
Recognition Accuracy (%)
SNR (dB) of Test Speech
FIGURE 6.1
Effect of additive white noise on speech recognition performance under matched and mismatched
conditions: training with clean speech (dotted line); training and testing with same-SNR speech
(solid line).
6.1 Introduction 137
Get Human-Centric Interfaces for Ambient Intelligence now with the O’Reilly learning platform.
O’Reilly members experience books, live events, courses curated by job role, and more from O’Reilly and nearly 200 top publishers.

