Chapter 5. Controlling a Hexapod with Johnny-Five
In this chapter, you will learn how to build a simple walking hexapod—a six-legged robot. The hexapod in this chapter, shown in Figure 5-1, will have three joints in each leg. The robot will be controlled using Johnny-Five’s Animation class. The Animation class is useful for scripting servos over time. It gives us a timeline, key frames, tweening, and easing functions. When you are done, you will have an excellent platform for building a more complex and interesting robot in the future.
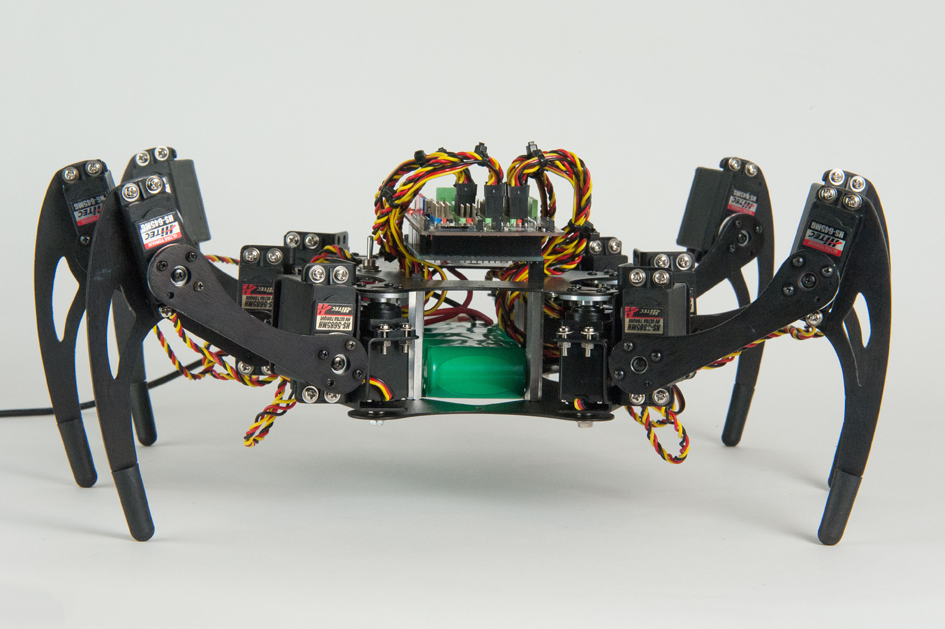
Figure 5-1. The finished hexapod
Bill of Materials
The materials used in this chapter are ...
Get Make: JavaScript Robotics now with the O’Reilly learning platform.
O’Reilly members experience books, live events, courses curated by job role, and more from O’Reilly and nearly 200 top publishers.

