April 2017
Beginner to intermediate
250 pages
6h 28m
English
A shape in the image frame is generated by the composition of a local deformation and a global transformation. Mathematically, this parameterization can be problematic, as the composition of these transformations results in a nonlinear function that does not admit a closed-form solution. A common way to circumvent this problem is to model the global transformation as a linear subspace and append it to the deformation subspace. For a fixed shape, a similarity transform can be modeled with a subspace as follows:
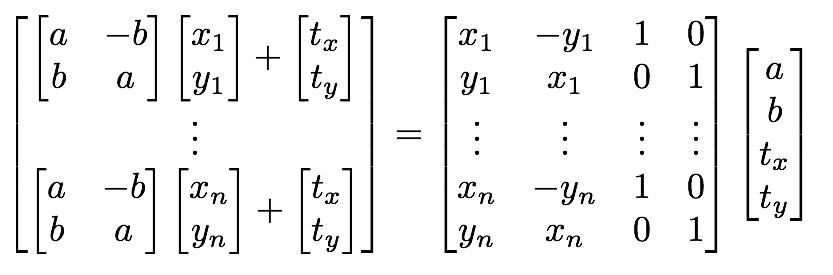
In the shape_model class, this subspace is generated using the calc_rigid_basis function. The ...
Read now
Unlock full access






