February 2018
Intermediate to advanced
648 pages
16h 11m
English
Infinite impulse response (IIR) filters are the first choice when speed is paramount and the phase non‐linearity characteristic is acceptable. IIR filters are computationally more efficient than finite impulse response (FIR) filters since they require fewer coefficients due to the fact that they use feedback or poles. However, this feedback can result in the filter being unstable if the coefficients deviate from their true values. This can happen during coefficient scaling or quantisation. In this chapter, it will be shown that the design and implementation of IIR filters are different than those for FIR filters.
The general equations of an IIR filter can be expressed as follows:
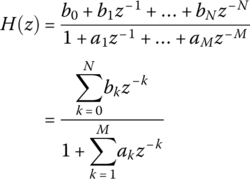
where ak and bk are the filter coefficients.
This transfer function can be factorised to give
where:
In terms of ...
Read now
Unlock full access






