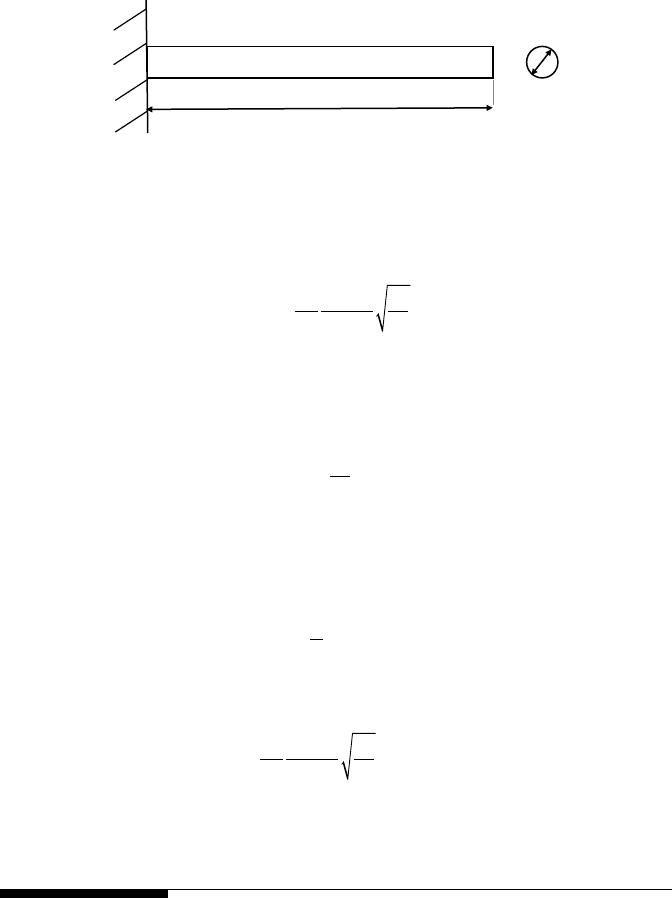
11Introduction
For this problem, L = 1 m and ρ = 7800 kg/m
3
. The rst cantilever fre-
quency is given by
f
L
EI
k
1
2
1
2
3 5156
=
π
.
(1.30)
where E is Young’s modulus of steel and its value is 2 × 10
11
N/m
2
. The
variable k is mass per unit length. The moment of inertia I for the rod is
given by
I d=
π
64
4
(1.31)
The optimization problem can be written as follows.
Minimize
π
ρ
2
d L (1.32)
subject to
1
2
3 5156
20
2
π
.
L
EI
k
≥
(1.33)
1.4 Solution with the Graphical Method
Having formulated the optimization problems in the previous section, it
is tempting for readers to get solutions for these problems. The graphical
method is a simple technique for locating ...






