This chapter will teach you the basics of adding parallelism to your Haskell code. We’ll start with some essential background about lazy evaluation in the next section before moving on to look at how to use parallelism in The Eval Monad, rpar, and rseq.
Haskell is a lazy language which means that expressions are not evaluated until they are required.[1] Normally, we don’t have to worry about how this happens; as long as expressions are evaluated when they are needed and not evaluated if they aren’t, everything is fine. However, when adding parallelism to our code, we’re telling the compiler something about how the program should be run: Certain things should happen in parallel. To be able to use parallelism effectively, it helps to have an intuition for how lazy evaluation works, so this section will explore the basic concepts using GHCi as a playground.
Let’s start with something very simple:
Prelude> let x = 1 + 2 :: Int
This binds the variable x to the expression 1 + 2 (at type Int, to avoid any complications due to overloading). Now, as far as
Haskell is concerned, 1 + 2 is equal to 3: We could have written
let x = 3 :: Int here, and there is no way to tell the difference by
writing ordinary Haskell code. But for the purposes of parallelism,
we really do care about the difference between 1 + 2 and 3,
because 1 + 2 is a computation that has not taken place yet, and we
might be able to compute it in parallel with something else. Of
course in practice, you wouldn’t want to do this with something as
trivial as 1 + 2, but the principle of an unevaluated computation is
nevertheless important.
We say at this point that x is unevaluated. Normally in Haskell,
you wouldn’t be able to tell that x was unevaluated, but fortunately
GHCi’s debugger provides some commands that inspect the structure of
Haskell expressions in a noninvasive way, so we can use those to
demonstrate what’s going on. The :sprint command prints the value
of an expression without causing it to be evaluated:
Prelude> :sprint x x = _
The special symbol _ indicates “unevaluated.” Another term you may
hear in this context is "thunk,” which is the object in memory
representing the unevaluated computation 1 + 2. The thunk in this
case looks something like Figure 2-1.
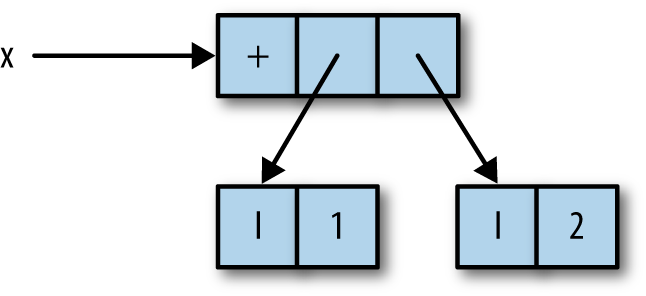
Here, x is a pointer to an object in memory representing the function
+ applied to the integers 1 and 2.
The thunk representing x will be evaluated whenever its value is
required. The easiest way to cause something to be evaluated in GHCi
is to print it; that is, we can just type x at the prompt:
Prelude> x 3
Now if we inspect the value of x using :sprint, we’ll find that
it has been evaluated:
Prelude> :sprint x x = 3
In terms of the objects in memory, the thunk representing 1 + 2 is
actually overwritten by the (boxed) integer 3.[2] So any future demand for the value of x gets the answer
immediately; this is how lazy evaluation works.
That was a trivial example. Let’s try making something slightly more complex.
Prelude> let x = 1 + 2 :: Int Prelude> let y = x + 1 Prelude> :sprint x x = _ Prelude> :sprint y y = _
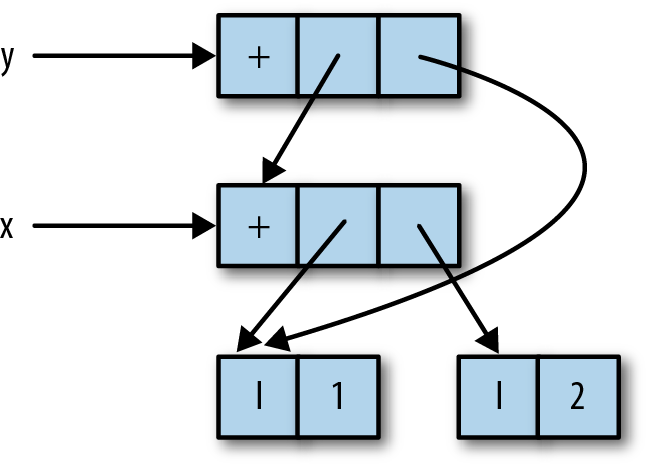
Again, we have x bound to 1 + 2, but now we have also bound y to
x + 1, and :sprint shows that both are unevaluated as expected.
In memory, we have a structure like Figure 2-2.
Unfortunately there’s no way to directly inspect this structure, so you’ll just have to trust me.
Now, in order to compute the value of y, the value of x is needed:
y depends on x. So evaluating y will also
cause x to be evaluated. This time we’ll use a different way
to force evaluation: Haskell’s built-in seq function.
Prelude> seq y () ()
The seq function evaluates its first argument, here y, and then
returns its second argument—in this case, just (). Now let’s
inspect the values of x and y:
Prelude> :sprint x x = 3 Prelude> :sprint y y = 4
Both are now evaluated, as expected. So the general principles so far are:
Let’s see what happens when a data structure is added:
Prelude> let x = 1 + 2 :: Int Prelude> let z = (x,x)
This binds z to the pair (x,x). The :sprint command shows
something interesting:
Prelude> :sprint z z = (_,_)
The underlying structure is shown in Figure 2-3.
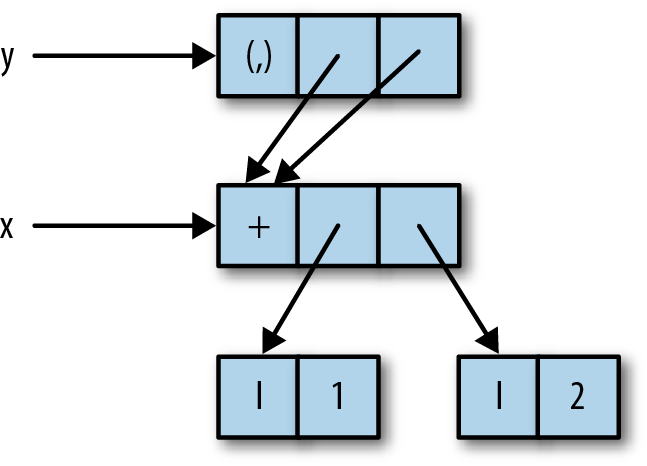
The variable z itself refers to the pair (x,x), but the components of the pair
both point to the unevaluated thunk for x. This shows that we can
build data structures with unevaluated components.
Let’s make z into a thunk again:
Prelude> import Data.Tuple Prelude Data.Tuple> let z = swap (x,x+1)
The swap function is defined as: swap (a,b) = (b,a). This z is
unevaluated as before:
Prelude Data.Tuple> :sprint z z = _
The point of this is so that we can see what happens when z is
evaluated with seq:
Prelude Data.Tuple> seq z () () Prelude Data.Tuple> :sprint z z = (_,_)
Applying seq to z caused it to be evaluated to a pair, but the
components of the pair are still unevaluated. The seq function
evaluates its argument only as far as the first
constructor, and doesn’t evaluate any more of the structure. There is
a technical term for this: We say that seq evaluates its first
argument to weak head normal form. The reason for this terminology
is somewhat historical, so don’t worry about it too much. We often
use the acronym WHNF instead. The term normal form on its own means “fully evaluated,” and we’ll see how to evaluate something to normal
form in Deepseq.
The concept of weak head normal form will crop up several times over
the next two chapters, so it’s worth taking the time to
understand it and get a feel for how evaluation happens in
Haskell. Playing around with expressions and :sprint in GHCi is a
great way to do that.
Just to finish the example, we’ll evaluate x:
Prelude Data.Tuple> seq x () ()
What will we see if we print the value of z?
Prelude Data.Tuple> :sprint z z = (_,3)
Remember that z was defined to be swap (x,x+1), which is (x+1,x), and
we just evaluated x, so the second component of z is now
evaluated and has the value 3.
Finally, we’ll take a look at an example with lists and a few of the
common list functions. You probably know the definition of map, but
here it is for reference:
map::(a->b)->[a]->[b]mapf[]=[]mapf(x:xs)=fx:mapfxs
The map function builds a lazy data structure. This might be clearer if we
rewrite the definition of map to make the thunks explicit:
map::(a->b)->[a]->[b]mapf[]=[]mapf(x:xs)=letx'=fxxs'=mapfxsinx':xs'
This behaves identically to the previous definition of map, but now
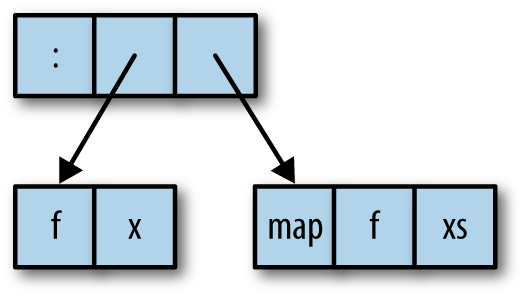
we can see that both the head and the tail of the list that map
returns are thunks: f x and map f xs, respectively. That is, map
builds a structure like Figure 2-4.
Let’s define a simple list structure using map:
Prelude> let xs = map (+1) [1..10] :: [Int]
Prelude> :sprint xs xs = _
Now we evaluate this list to weak head normal form:
Prelude> seq xs () () Prelude> :sprint xs xs = _ : _
We have a list with at least one element, but that is all we know
about it so far. Next, we’ll apply the length function to the list:
Prelude> length xs 10
The length function is defined like this:
length::[a]->Intlength[]=0length(_:xs)=1+lengthxs
Note that length ignores the head of the list, recursing on the
tail, xs. So when length is applied to a list, it will descend
the structure of the list, evaluating the list cells but not the
elements. We can see the effect clearly with :sprint:
Prelude> :sprint xs xs = [_,_,_,_,_,_,_,_,_,_]
GHCi noticed that the list cells were all evaluated, so it switched to
using the bracketed notation rather than infix : to display the
list.
Even though we have now evaluated the entire spine of the list, it is
still not in normal form (but it is still in weak head normal form).
We can cause it to be fully evaluated by applying a function that demands
the values of the elements, such as sum:
Prelude> sum xs 65 Prelude> :sprint xs xs = [2,3,4,5,6,7,8,9,10,11]
We have scratched the surface of what is quite a subtle and complex topic. Fortunately, most of the time, when writing Haskell code, you don’t need to worry about understanding when things get evaluated. Indeed, the Haskell language definition is very careful not to specify exactly how evaluation happens; the implementation is free to choose its own strategy as long as the program gives the right answer. And as programmers, most of the time that’s all we care about, too. However, when writing parallel code, it becomes important to understand when things are evaluated so that we can arrange to parallelize computations.
An alternative to using lazy evaluation for parallelism is to be more
explicit about the data flow, and this is the approach taken by the
Par monad in Chapter 4. This avoids some of the subtle
issues concerning lazy evaluation in exchange for some verbosity.
Nevertheless, it’s worthwhile to learn about both approaches because
there are situations where one is more natural or more efficient than
the other.
Next, we introduce some basic functionality for creating
parallelism, which is provided by the module
Control.Parallel.Strategies:
dataEvalainstanceMonadEvalrunEval::Evala->arpar::a->Evalarseq::a->Evala
Parallelism is expressed using the Eval monad, which comes with two
operations, rpar and rseq. The rpar combinator creates
parallelism: It says, “My argument could be evaluated in parallel”;
while rseq is used for forcing sequential evaluation: It says, “Evaluate my argument and wait for the result.” In both cases,
evaluation is to weak head normal form. It’s also worth noting that
the argument to rpar should be an unevaluated computation—a thunk.
If the argument is already evaluated, nothing useful happens, because
there is no work to perform in parallel.
The Eval monad provides a runEval operation that performs the
Eval computation and returns its result. Note that runEval is
completely pure; there’s no need to be in the IO monad here.
To see the effects of rpar and rseq, suppose we have a function f, along with two
arguments to apply it to, x and y, and we would like to calculate
the results of f x and f y in parallel. Let’s say that f x takes
longer to evaluate than f y. We’ll look at a few different ways to
code this and investigate the differences between them. First,
suppose we used rpar with both f x and f y, and then returned a
pair of the results, as shown in Example 2-1.
Execution of this program fragment proceeds as shown in Figure 2-5.
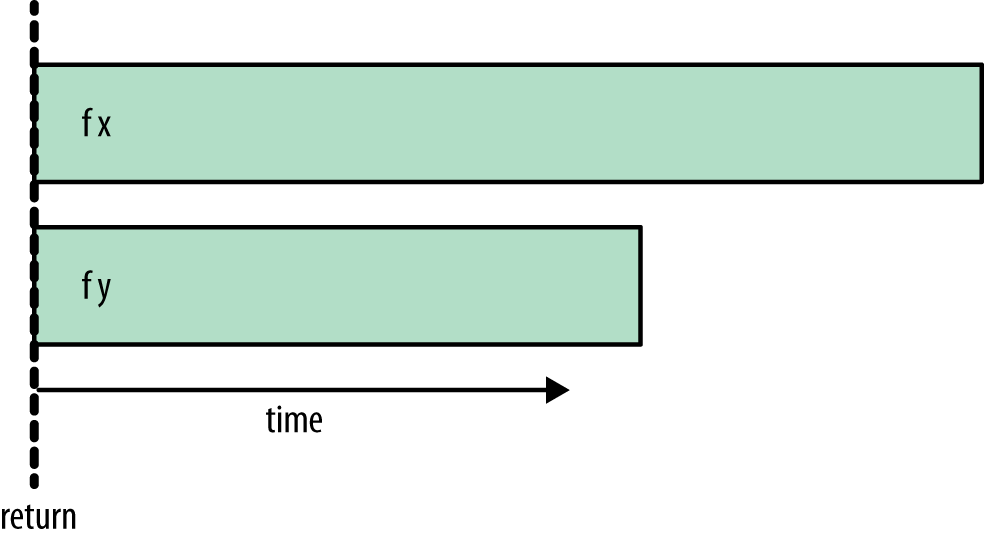
We see that f x and f y begin to evaluate in parallel, while the
return happens immediately: It doesn’t wait for either f x or f
y to complete. The rest of the program will continue to execute
while f x and f y are being evaluated in parallel.
Let’s try a different variant, replacing the second rpar with
rseq:
Now the execution will look like Figure 2-6.
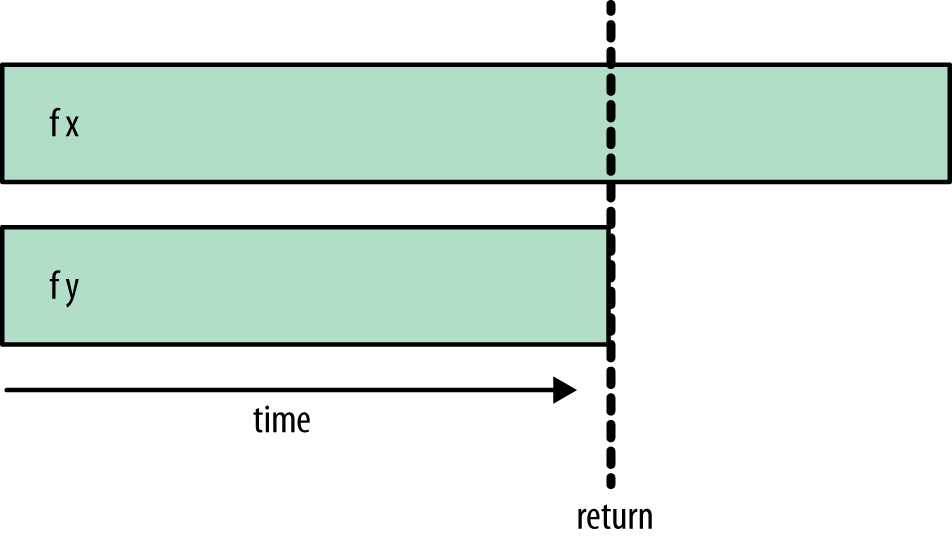
Here f x and f y are still evaluated in parallel, but now the
final return doesn’t happen until f y has completed. This is
because we used rseq, which waits for the evaluation of its argument
before returning.
If we add an additional rseq to wait for f x, we’ll wait for
both f x and f y to complete:
Note that the new rseq is applied to a, namely the result of the
first rpar.
This results in the ordering shown in Figure 2-7.
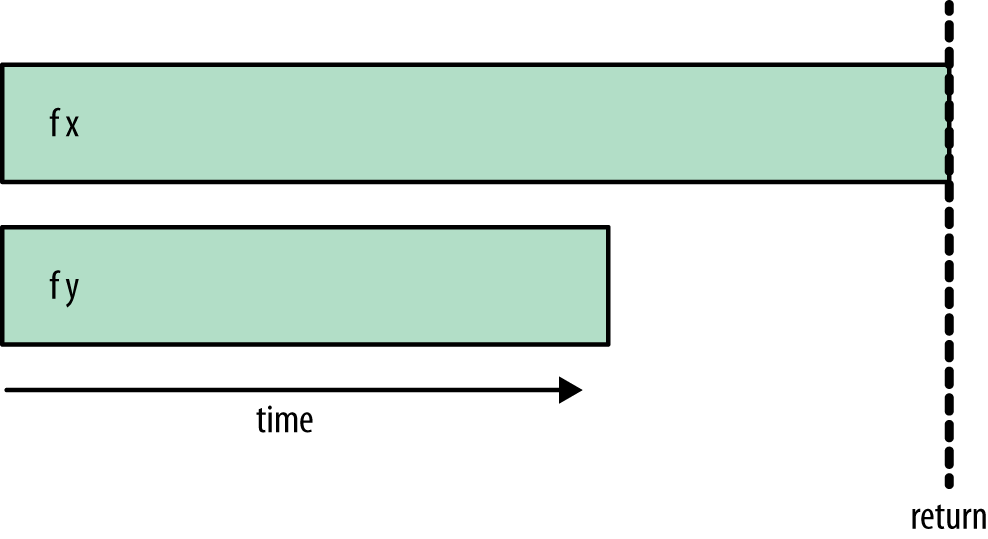
The code waits until both f x and f y have completed evaluation
before returning.
Which of these patterns should we use?
- rpar/rseq is unlikely to be useful because the programmer rarely knows in advance which of the two computations takes the longest, so it makes little sense to wait for an arbitrary one of the two.
- The choice between rpar/rpar or rpar/rseq/rseq styles depends on the circumstances. If we expect to be generating more parallelism soon and don’t depend on the results of either operation, it makes sense to use rpar/rpar, which returns immediately. On the other hand, if we have generated all the parallelism we can, or we need the results of one of the operations in order to continue, then rpar/rseq/rseq is an explicit way to do that.
Example 2-4. rpar/rpar/rseq/rseq
runEval$doa<-rpar(fx)b<-rpar(fy)rseqarseqbreturn(a,b)
This has the same behavior as rpar/rseq/rseq, waiting for both evaluations before returning. Although it is the longest, this variant has more symmetry than the others, so it might be preferable for that reason.
To experiment with these variants yourself, try the sample program
rpar.hs, which uses the Fibonacci function to simulate
the expensive computations to run in parallel. In order to use parallelism with GHC, we have to use the -threaded option. Compile the program like this:
$ ghc -O2 rpar.hs -threaded
To try the rpar/rpar variant, run it as follows. The +RTS -N2 flag tells GHC to use two cores to run the program (ensure that you have at least
a dual-core machine):
$ ./rpar 1 +RTS -N2 time: 0.00s (24157817,14930352) time: 0.83s
The first timestamp is printed when the rpar/rseq fragment
returns, and the second timestamp is printed when the last calculation
finishes. As you can see, the return here happened immediately. In rpar/rseq, it happens
after the second (shorter) computation has completed:
$ ./rpar 2 +RTS -N2 time: 0.50s (24157817,14930352) time: 0.82s
In rpar/rseq/rseq, the return happens at the end:
$ ./rpar 3 +RTS -N2 time: 0.82s (24157817,14930352) time: 0.82s
In this section, we’ll walk through a case study, exploring how to add parallelism to a program that performs the same computation on multiple input data. The computation is an implementation of a Sudoku solver. This solver is fairly fast as Sudoku solvers go, and can solve all 49,000 of the known 17-clue puzzles in about 2 minutes.
The goal is to parallelize the solving of multiple puzzles. We aren’t interested in the details of how the solver works; for the purposes of this discussion, the solver will be treated as a black box. It’s just an example of an expensive computation that we want to perform on multiple data sets, namely the Sudoku puzzles.
We will use a module Sudoku that provides a function solve with
type:
solve::String->MaybeGrid
The String represents a single Sudoku problem. It is a flattened
representation of the 9×9 board, where each square is either empty,
represented by the character ., or contains a digit 1–9.
The function solve returns a value of type Maybe Grid, which is
either Nothing if a problem has no solution, or Just g if a solution
was found, where g has type Grid. For the purposes of this
example, we are not interested in the solution itself, the Grid, but only
in whether the puzzle has a solution at all.
We start with some ordinary sequential code to solve a set of Sudoku problems read from a file:
importSudokuimportControl.ExceptionimportSystem.EnvironmentimportData.Maybemain::IO()main=do[f]<-getArgs--
file<-readFilef--
letpuzzles=linesfile--
solutions=mapsolvepuzzles--
(length(filterisJustsolutions))--
This short program works as follows:
-
Grab the command-line arguments, expecting a single argument, the name of the file containing the input data.
-
Read the contents of the given file.
-
Split the file into lines; each line is a single puzzle.
-
Solve all the puzzles by mapping the
solvefunction over the list of lines.
Calculate the number of puzzles that had solutions, by first filtering out any results that are
Nothingand then taking the length of the resulting list. This length is then printed. Even though we’re not interested in the solutions themselves, thefilter isJustis necessary here: Without it, the program would never evaluate the elements of the list, and the work of the solver would never be performed (recall thelengthexample at the end of Lazy Evaluation and Weak Head Normal Form).
Let’s check that the program works by running over a set of sample problems. First, compile the program:
$ ghc -O2 sudoku1.hs -rtsopts [1 of 2] Compiling Sudoku ( Sudoku.hs, Sudoku.o ) [2 of 2] Compiling Main ( sudoku1.hs, sudoku1.o ) Linking sudoku1 ...
Remember that when working on performance, it is important to compile with
full optimization (-O2). The goal is to make the program run faster,
after all.
Now we can run the program on 1,000 sample problems:
$ ./sudoku1 sudoku17.1000.txt 1000
All 1,000 problems have solutions, so the answer is 1,000. But what we’re really interested in is how long the program took to run, because we want to make it go faster. So let’s run it again with some extra command-line arguments:
$ ./sudoku1 sudoku17.1000.txt +RTS -s
1000
2,352,273,672 bytes allocated in the heap
38,930,720 bytes copied during GC
237,872 bytes maximum residency (14 sample(s))
84,336 bytes maximum slop
2 MB total memory in use (0 MB lost due to fragmentation)
Tot time (elapsed) Avg pause Max pause
Gen 0 4551 colls, 0 par 0.05s 0.05s 0.0000s 0.0003s
Gen 1 14 colls, 0 par 0.00s 0.00s 0.0001s 0.0003s
INIT time 0.00s ( 0.00s elapsed)
MUT time 1.25s ( 1.25s elapsed)
GC time 0.05s ( 0.05s elapsed)
EXIT time 0.00s ( 0.00s elapsed)
Total time 1.30s ( 1.31s elapsed)
%GC time 4.1% (4.1% elapsed)
Alloc rate 1,883,309,531 bytes per MUT second
Productivity 95.9% of total user, 95.7% of total elapsedThe argument +RTS -s instructs the GHC runtime system to emit the
statistics shown. These are particularly helpful as a first
step in analyzing performance. The output is explained in
detail in the GHC User’s Guide, but for our purposes we are interested
in one particular metric: Total time. This figure is given in two
forms: the total CPU time used by the program and the
elapsed or wall-clock time. Since we are
running on a single processor core, these times are almost identical
(sometimes the elapsed time might be slightly longer due to other
activity on the system).
We shall now add some parallelism to make use of two processor cores. We have a list of problems to solve, so as a first attempt we’ll divide the list in two and solve the problems in both halves of the list in parallel. Here is some code to do just that:
main::IO()main=do[f]<-getArgsfile<-readFilefletpuzzles=linesfile(as,bs)=splitAt(lengthpuzzles`div`2)puzzles--solutions=runEval$doas'<-rpar(force(mapsolveas))--bs'<-rpar(force(mapsolvebs))--rseqas'--rseqbs'--return(as'++bs')--
(length(filterisJustsolutions))
-
Divide the list of puzzles into two equal sublists (or almost equal, if the list had an odd number of elements).
-
We’re using the rpar/rpar/rseq/rseq pattern from the previous section to solve both halves of the list in parallel. However, things are not completely straightforward, because
rparonly evaluates to weak head normal form. If we were to userpar (map solve as), the evaluation would stop at the first(:)constructor and go no further, so therparwould not cause any of the work to take place in parallel. Instead, we need to cause the whole list and the elements to be evaluated, and this is the purpose offorce:force::NFDataa=>a->aThe
forcefunction evaluates the entire structure of its argument, reducing it to normal form, before returning the argument itself. It is provided by theControl.DeepSeqmodule. We’ll return to theNFDataclass in Deepseq, but for now it will suffice to think of it as the class of types that can be evaluated to normal form.Not evaluating deeply enough is a common mistake when using
rpar, so it is a good idea to get into the habit of thinking, for eachrpar, “How much of this structure do I want to evaluate in the parallel task?” (Indeed, it is such a common problem that in theParmonad to be introduced later, the designers went so far as to makeforcethe default behavior).-
Using
rseq, we wait for the evaluation of both lists to complete.-
Append the two lists to form the complete list of solutions.
Let’s run the program and measure how much performance improvement we get from the parallelism:
$ ghc -O2 sudoku2.hs -rtsopts -threaded [2 of 2] Compiling Main ( sudoku2.hs, sudoku2.o ) Linking sudoku2 ...
Now we can run the program using two cores:
$ ./sudoku2 sudoku17.1000.txt +RTS -N2 -s
1000
2,360,292,584 bytes allocated in the heap
48,635,888 bytes copied during GC
2,604,024 bytes maximum residency (7 sample(s))
320,760 bytes maximum slop
9 MB total memory in use (0 MB lost due to fragmentation)
Tot time (elapsed) Avg pause Max pause
Gen 0 2979 colls, 2978 par 0.11s 0.06s 0.0000s 0.0003s
Gen 1 7 colls, 7 par 0.01s 0.01s 0.0009s 0.0014s
Parallel GC work balance: 1.49 (6062998 / 4065140, ideal 2)
MUT time (elapsed) GC time (elapsed)
Task 0 (worker) : 0.81s ( 0.81s) 0.06s ( 0.06s)
Task 1 (worker) : 0.00s ( 0.88s) 0.00s ( 0.00s)
Task 2 (bound) : 0.52s ( 0.83s) 0.04s ( 0.04s)
Task 3 (worker) : 0.00s ( 0.86s) 0.02s ( 0.02s)
SPARKS: 2 (1 converted, 0 overflowed, 0 dud, 0 GC'd, 1 fizzled)
INIT time 0.00s ( 0.00s elapsed)
MUT time 1.34s ( 0.81s elapsed)
GC time 0.12s ( 0.06s elapsed)
EXIT time 0.00s ( 0.00s elapsed)
Total time 1.46s ( 0.88s elapsed)
Alloc rate 1,763,903,211 bytes per MUT second
Productivity 91.6% of total user, 152.6% of total elapsedNote that the Total time now shows a marked difference between the
CPU time (1.46s) and the elapsed time (0.88s). Previously, the elapsed
time was 1.31s, so we can calculate the speedup on 2 cores
as 1.31/0.88 = 1.48. Speedups are always calculated as a ratio of
wall-clock times. The CPU time is a helpful metric for telling us how
busy our cores are, but as you can see here, the CPU time when
running on multiple cores is often greater than the wall-clock
time for a single core, so it would be misleading to calculate
the speedup as the ratio of CPU time to wall-clock time (1.66 here).
Why is the speedup only 1.48, and not 2? In general, there could be a
host of reasons for this, not all of which are under the control of
the Haskell programmer. However, in this case the problem is partly
of our doing, and we can diagnose it using the ThreadScope tool. To
profile the program using ThreadScope, we need to first recompile it
with the -eventlog flag and then run it with +RTS -l. This
causes the program to emit a log file called sudoku2.eventlog, which
we can pass to threadscope:
$ rm sudoku2; ghc -O2 sudoku2.hs -threaded -rtsopts -eventlog [2 of 2] Compiling Main ( sudoku2.hs, sudoku2.o ) Linking sudoku2 ... $ ./sudoku2 sudoku17.1000.txt +RTS -N2 -l 1000 $ threadscope sudoku2.eventlog
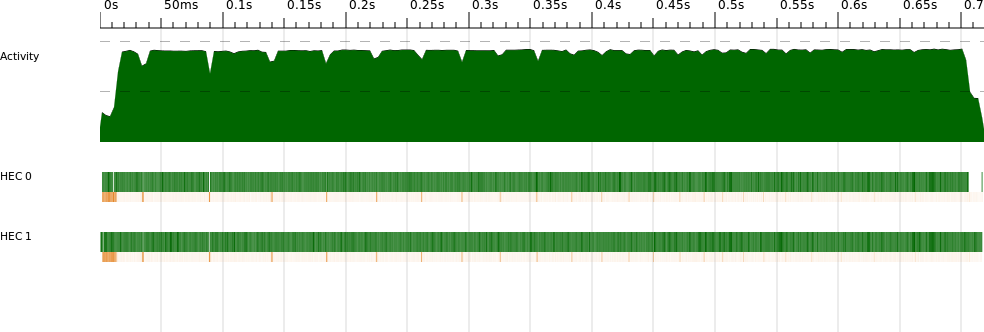
The ThreadScope profile is shown in Figure 2-8. This graph was generated by selecting “Export image” from ThreadScope, so it includes the timeline graph only, and not the rest of the ThreadScope GUI.
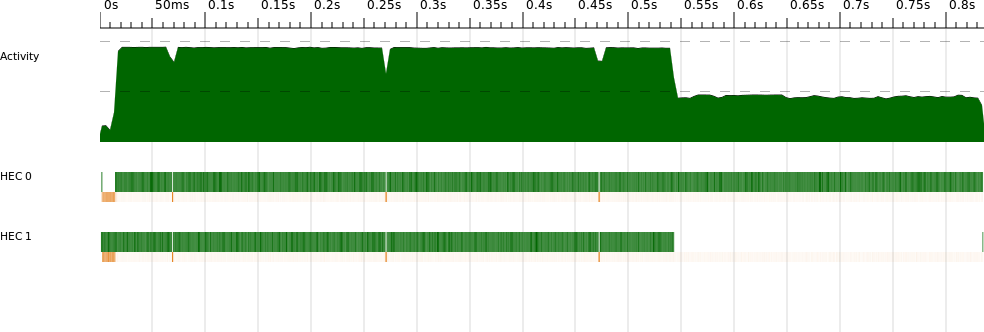
The x-axis of the graph is time, and there are three horizontal bars showing how the program executed over time. The topmost bar is known as the “activity” profile, and it shows how many cores were executing Haskell code (as opposed to being idle or garbage collecting) at a given point in time. Underneath the activity profile is one bar per core, showing what that core was doing at each point in the execution. Each bar has two parts: The upper, thicker bar is green when that core is executing Haskell code, and the lower, narrower bar is orange or green when that core is performing garbage collection.
As we can see from the graph, there is a period at the end of the run where just one processor is executing and the other one is idle (except for participating in regular garbage collections, which is necessary for GHC’s parallel garbage collector). This indicates that our two parallel tasks are uneven: One takes much longer to execute than the other. We are not making full use of our two cores, and this results in less-than-perfect speedup.
Why should the workloads be uneven? After all, we divided the list in two, and we know the sample input has an even number of problems. The reason for the unevenness is that each problem does not take the same amount of time to solve: It all depends on the searching strategy used by the Sudoku solver.[3]
This illustrates an important principle when parallelizing code: Try to avoid partitioning the work into a small, fixed number of chunks. There are two reasons for this:
- In practice, chunks rarely contain an equal amount of work, so there will be some imbalance leading to a loss of speedup, as in the example we just saw.
- The parallelism we can achieve is limited to the number of chunks. In our example, even if the workloads were even, we could never achieve a speedup of more than two, regardless of how many cores we use.
Even if we tried to solve the second problem by dividing the work into as many segments as we have cores, we would still have the first problem, namely that the work involved in processing each segment may differ.
GHC doesn’t force us to use a fixed number of rpar calls; we can
call it as many times as we like, and the system will automatically
distribute the parallel work among the available cores. If the work
is divided into smaller chunks, then the system will be able to keep all
the cores busy for longer.
A fixed division of work is often called static partitioning,
whereas distributing smaller units of work among processors at
runtime is called dynamic partitioning. GHC already provides
the mechanism for dynamic partitioning; we just have to supply it with
enough tasks by calling rpar often enough so that it can do its job
and balance the work evenly.
The argument to rpar is called a spark. The runtime collects sparks in a pool and uses this as a source of work when there
are spare processors available, using a technique called work stealing. Sparks may be evaluated at some point in the future, or
they might not—it all depends on whether there is a spare core
available. Sparks are very cheap to create: rpar
essentially just writes a pointer to the expression into an array.
So let’s try to use dynamic partitioning with the Sudoku problem.
First, we define an abstraction that will let us apply a function to a
list in parallel, parMap:
parMap::(a->b)->[a]->Eval[b]parMapf[]=return[]parMapf(a:as)=dob<-rpar(fa)bs<-parMapfasreturn(b:bs)
This is rather like a monadic version of map, except that we have
used rpar to lift the application of the function f to the element
a into the Eval monad. Hence, parMap runs down the whole list,
eagerly creating sparks for the application of f to each element,
and finally returns the new list. When parMap returns, it will have
created one spark for each element of the list. Now, the evaluation
of all the results can happen in parallel:
main::IO()main=do[f]<-getArgsfile<-readFilefletpuzzles=linesfilesolutions=runEval(parMapsolvepuzzles)(length(filterisJustsolutions))
Note how this version is nearly identical to the first version,
sudoku1.hs. The only difference is that we’ve replaced map solve
puzzles by runEval (parMap solve puzzles).
Running this new version yields more speedup:
Total time 1.42s ( 0.72s elapsed)
which corresponds to a speedup of 1.31/0.72 = 1.82, approaching the ideal speedup of 2. Furthermore, the GHC runtime system tells us how many sparks were created:
SPARKS: 1000 (1000 converted, 0 overflowed, 0 dud, 0 GC'd, 0 fizzled)
We created exactly 1,000 sparks, and they were all converted (that is, turned into real parallelism at runtime). Here are some other things that can happen to a spark:
- overflowed
- The spark pool has a fixed size, and if we try to create sparks when the pool is full, they are dropped and counted as overflowed.
- dud
-
When
rparis applied to an expression that is already evaluated, this is counted as a dud and therparis ignored. - GC’d
- The sparked expression was found to be unused by the program, so the runtime removed the spark. We’ll discuss this in more detail in GC’d Sparks and Speculative Parallelism.
- fizzled
- The expression was unevaluated at the time it was sparked but was later evaluated independently by the program. Fizzled sparks are removed from the spark pool.
The ThreadScope profile for this version looks much better (Figure 2-9). Furthermore, now that the runtime is managing the work distribution for us, the program will automatically scale to more processors. On an 8-core machine, for example, I measured a speedup of 5.83 for the same program.[4]
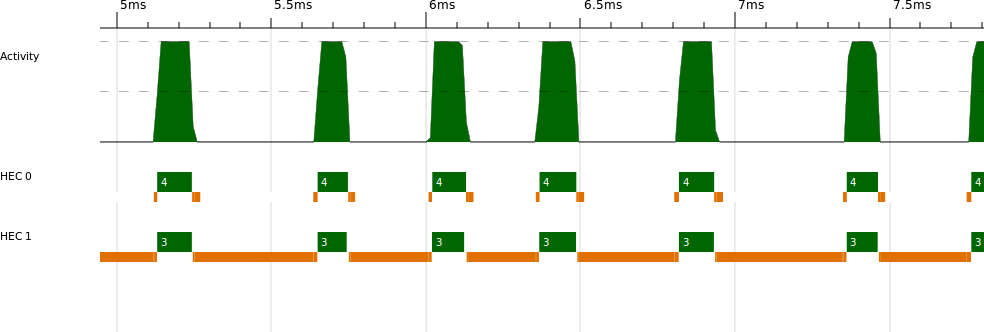
If we look closely at the two-processor profile, there appears to be a
short section near the beginning where not much work is happening. In
fact, zooming in on this section in ThreadScope
(Figure 2-10) reveals that both processors are
working, but most of the activity is garbage collection, and only one
processor is performing most of the garbage collection work. In fact,
what we are seeing here is the program reading the input file (lazily)
and dividing it into lines, driven by the demand of parMap, which
traverses the whole list of lines. Splitting the file into
lines creates a lot of data, and this seems to be happening on the
second core here. However, note that even though splitting the file
into lines is sequential, the program doesn’t wait for it to complete
before the parallel work starts. The parMap function creates the
first spark when it has the first element of the list, so
two processors can be working before we’ve finished splitting the file into
lines. Lazy evaluation helps the program be more parallel, in a
sense.
We can experiment with forcing the splitting into lines to happen all at once before we start the main computation, by adding the following (see sudoku3.hs):
evaluate(lengthpuzzles)
The evaluate function is like a seq in the IO monad: it evaluates its argument to weak head normal form and then returns it:
evaluate::a->IOa
Forcing the lines to be evaluated early reduces the parallelism slightly, because we no longer get the benefit of overlapping the line splitting with the solving. Our two-core runtime is now 0.76s. However, we can now clearly see the boundary between the sequential and parallel parts in ThreadScope (Figure 2-11).
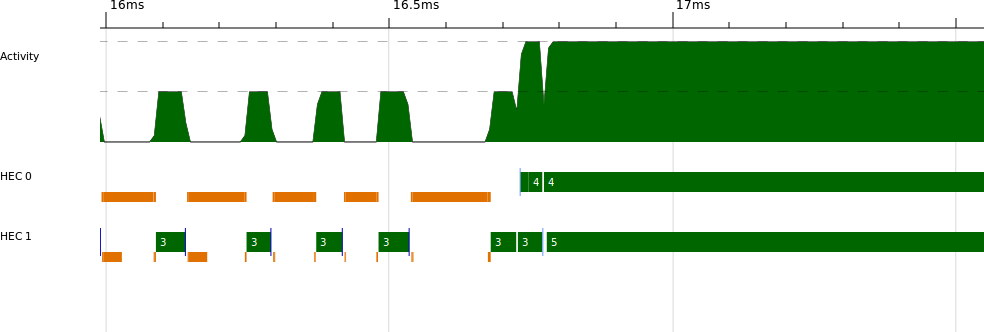
Looking at the profile, we can see that the program is sequential until about 16.7ms, when it starts executing in parallel. A program that has a sequential portion like this can never achieve perfect speedup, and in fact we can calculate the maximum achievable speedup for a given number of cores using Amdahl’s law. Amdahl’s law gives the maximum speedup as the ratio:
1 / ((1 - P) + P/N)
where P is the portion of the runtime that can be parallelized, and N is the number of processors available. In our case, P is (0.76 - 0.0167)/0.76 = 0.978, and the maximum speedup is 1.96. The sequential fraction here is too small to make a significant impact on the theoretical maximum speedup with two processors, but when we have more processors, say 64, it becomes much more important: 1 / ((1-0.978) + 0.978/64) = 26.8. So no matter what we do, this tiny sequential part of our program will limit the maximum speedup we can obtain with 64 processors to 26.8. In fact, even with 1,024 cores, we could achieve only around 44 speedup, and it is impossible to achieve a speedup of 46 no matter how many cores we have. Amdahl’s law tells us that not only does parallel speedup become harder to achieve the more processors we add, but in practice most programs have a theoretical maximum amount of parallelism.
We encountered force earlier, with this type:
force::NFDataa=>a->a
The force function fully evaluates its argument and then returns
it. This function isn’t built-in, though: Its behavior is defined for
each data type through the NFData class. The name stands for
normal-form data, where normal-form is a value with no unevaluated
subexpressions, and “data” because it isn’t possible to put a function
in normal form; there’s no way to “look inside” a function and
evaluate the things it mentions.[5]
The NFData class has only one method:
classNFDataawherernf::a->()rnfa=a`seq`()
The rnf name stands for “reduce to normal-form.” It fully evaluates
its argument and then returns (). The default definition uses
seq, which is convenient for types that have no substructure; we can
just use the default. For example, the instance for Bool is defined
as simply:
instanceNFDataBool
And the Control.Deepseq module provides instances for all the other
common types found in the libraries.
You may need to create instances of NFData for your own types. For example, if we had a binary tree
data type:
dataTreea=Empty|Branch(Treea)a(Treea)
then the NFData instance should look like this:
instanceNFDataa=>NFData(Treea)wherernfEmpty=()rnf(Branchlar)=rnfl`seq`rnfa`seq`rnfr
The idea is to just recursively apply rnf to the components of the
data type, composing the calls to rnf together with seq.
There are some other operations provided by Control.DeepSeq:
deepseq::NFDataa=>a->b->bdeepseqab=rnfa`seq`b
The function deepseq is so named for its similarity with seq; it is like seq,
but if we think of weak head normal form as being shallow
evaluation, then normal form is deep evaluation, hence deepseq.
The force function is defined in terms of deepseq:
force::NFDataa=>a->aforcex=x`deepseq`x
You should think of force as turning WHNF into NF: If the program
evaluates force x to WHNF, then x will be evaluated to NF.
Caution
Evaluating something to normal form involves traversing the whole of
its structure, so you should bear in mind that it is O(n) for a structure of size n, whereas
seq is O(1). It is therefore a good idea to avoid repeated uses
of force or deepseq on the same data.
WHNF and NF are two ends of a scale; there may be lots of intermediate
“degrees of evaluation,” depending on the data type. For example, we
saw earlier that the length function evaluates only the spine of a
list; that is, the list cells but not the elements. The module
Control.Seq (from the parallel package) provides a set of
combinators that can be composed together to evaluate data structures
to varying degrees. We won’t need it for the examples in this book,
but you may find it useful.
[1] Technically, this is not correct. Haskell is actually a non-strict language, and lazy evaluation is just one of several valid implementation strategies. But GHC uses lazy evaluation, so we ignore this technicality for now.
[2] Strictly speaking, it is overwritten by an indirect reference to the value, but the details aren’t important here. Interested readers can head over to the GHC wiki to read the documentation about the implementation and the many papers written about its design.
[3] In fact, I sorted the problems in the sample input so as to clearly demonstrate the problem.
[4] This machine was an Amazon EC2 High-CPU extra-large instance.
[5] However, there is an instance of NFData for functions, which evaluates the function to WHNF. This is purely for convenience, because we often have data structures that contain functions and nevertheless want to evaluate them as much as possible.
Get Parallel and Concurrent Programming in Haskell now with the O’Reilly learning platform.
O’Reilly members experience books, live events, courses curated by job role, and more from O’Reilly and nearly 200 top publishers.

