Appendix DOvervaluation of the Maximum Error in a Tracking Problem for a Lur’e Postnikov Type Process
Let us consider the third-order Lur’e Postnikov type system with the state vector xI1 and the system with uncertainties of state vector xI2, such that
[D.1]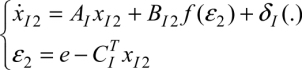
with
[D.2]
First, we must carry out a change of basis defined by the matrix PI so that ![]() is the last component of the state vector x; for the vector characterizing the output, we obtain:
is the last component of the state vector x; for the vector characterizing the output, we obtain:
[D.3]
[D.4]
There are an infinite number of basis changes that give this result.
For PI defined by
[D.5]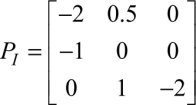
we obtain
[D.6]
with
[D.7]
and
[D.8]
or for the process ...
Get Process Control Design for Industrial Applications now with the O’Reilly learning platform.
O’Reilly members experience books, live events, courses curated by job role, and more from O’Reilly and nearly 200 top publishers.

