March 2018
Intermediate to advanced
1396 pages
42h 14m
English
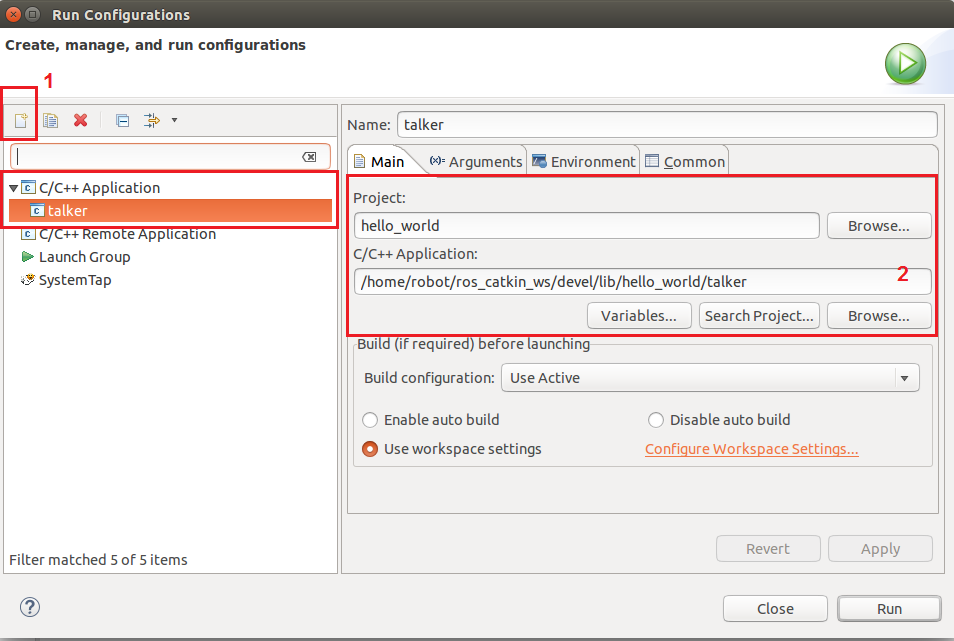
After building the project, we may can run the node from Eclipse or from a terminal. For running the node inside Eclipse, right-click on the project and go to Run as | Run Configurations.
Create a New Launch Configuration under C/C++ Application. In the Main tab, browse the executable path in C/C++ Application. While we build the nodes in Eclipse, we can see the executable generating path. Browse the path of the executables here.
Here we are creating a launcher for the talker node, as shown in the following screenshot:
After the preceding ...
Read now
Unlock full access






