March 2018
Intermediate to advanced
1396 pages
42h 14m
English
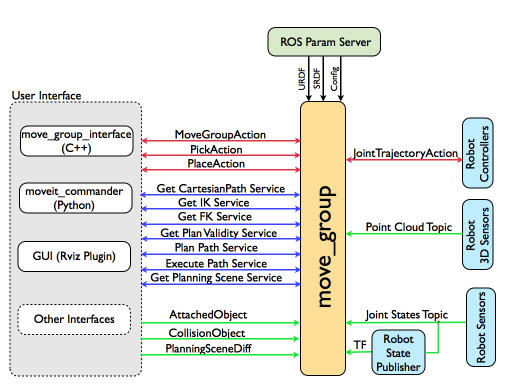
The architecture of MoveIt! is depicted in the following diagram taken from the concepts sections of its official documentation at http://moveit.ros.org/documentation/concepts/. Here, we describe the main concepts in brief. In order to install MoveIt!, you only have to run this command:
$ sudo apt-get install ros-kinetic-moveit-full
Alternatively, you can install all the dependencies of the code that comes with this chapter by running the following command from a workspace that contains it:
$ rosdep install --from-paths src -iy
The following diagram shows the architecture of MoveIt!:
Read now
Unlock full access






