In this example, we can interface the LED and push button to Arduino and control using ROS. When the push button is pressed, the Arduino node sends a True value to a topic called pushed, and at the same time, it switches on the LED which is on the Arduino board. The following shows the circuit for doing this example:
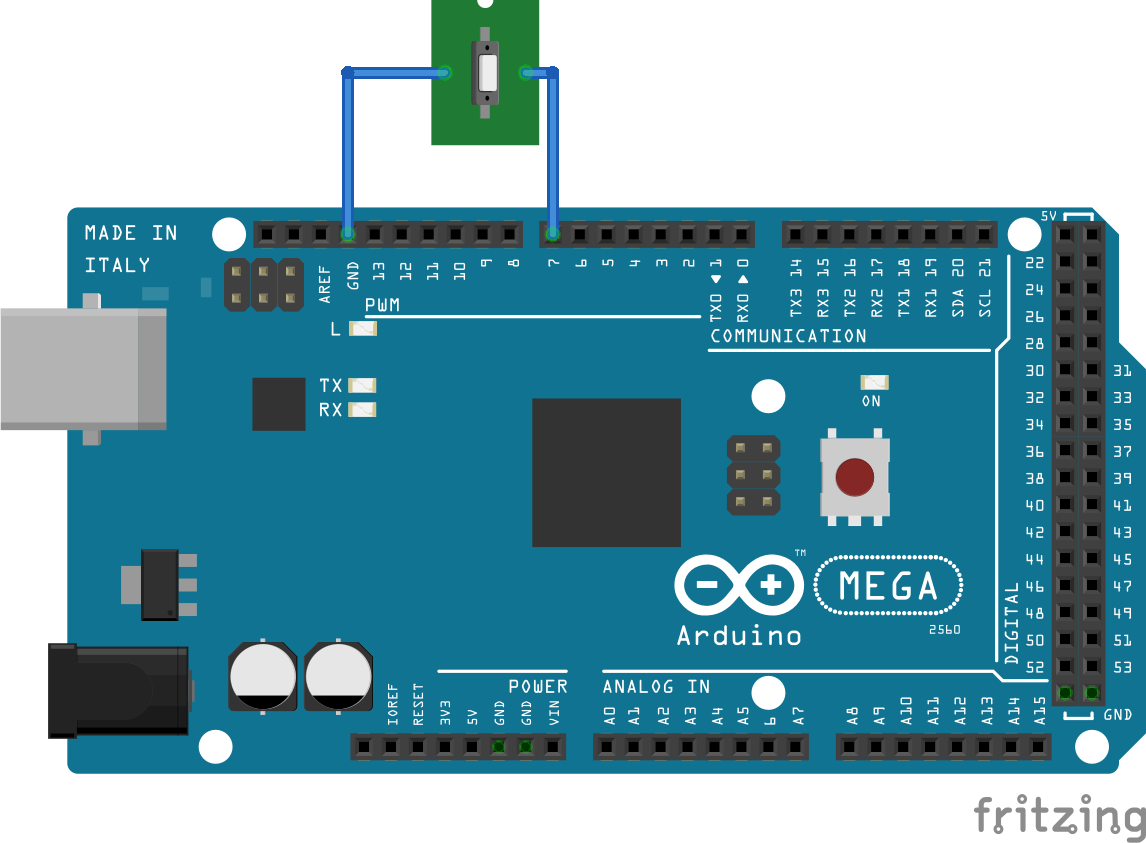
Figure 10 : Interfacing the push button to Arduino
/* * Button Example for Rosserial */ #include <ros.h> #include <std_msgs/Bool.h> //Nodehandle ros::NodeHandle nh; //Boolean message for Push button std_msgs::Bool pushed_msg; //Defining Publisher in a topic called pushed ros::Publisher ...

