After doing the preceding configuration, we can start adding ROS packages to Eclipse IDE. Click on File Menu | Project... from the New Project wizard, select C/C++ | MakeFileProject with Existing Code:
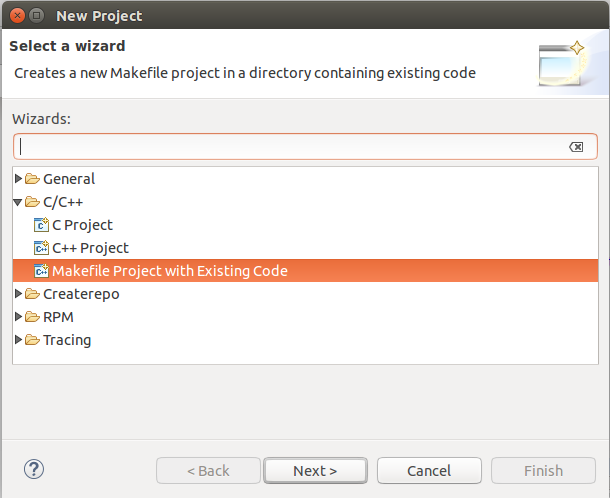
Figure 6: Open the ROS package from the catkin workspace
There was a hello_world ROS package in ros_catkin_ws; we are opening this project. This package consists of two ROS nodes, talker.cpp and listener.cpp. You can open any packages on your workspace.
Give a name for this project as hello_world and browse the ROS package from the catkin workspace as shown in the following screenshot:
Figure 7: Giving project ...

