April 2010
Intermediate to advanced
588 pages
19h 56m
English
In future multi-view video coding standards, the use of disparity/depth information will be essential, and consideration of coding such data is needed. Having such information enables the development of new applications containing interactivity, i.e. the user can freely navigate in a visual scene through the existence of virtual camera scenes.
In this research, the effect of lossy encoded disparity maps on the inter-view prediction will be investigated. If this information is available, it can be used to assist inter-view prediction. Hence, the overall bit rate is reduced, and furthermore the complexity of the multi-view encoder is reduced as well.
The developed framework consists of four main building blocks, which are explained in the following subsections.
To reduce the correspondence search to one dimension, the fundamental matrix F is required. This step has to be carried out once for a fixed camera setup. The following steps are needed to estimate F [22]:
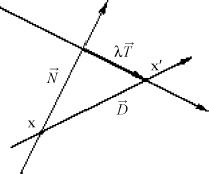
Figure 6.4 Parameterization of disparity
Read now
Unlock full access






