Chapter 8. Physical Output
8.0. Introduction
You can make things move by controlling motors with Arduino. Different types of motors suit different applications, and this chapter shows how Arduino can drive many different kinds of motors.
Motion Control Using Servos
Servos enable you to accurately control physical movement because they generally move to a position instead of continuously rotating. They are ideal for making something rotate over a range of 0 to 180 degrees. Servos are easy to connect and control because the motor driver is built into the servo.
Servos contain a small motor connected through gears to an output shaft. The output shaft drives a servo arm and is also connected to a potentiometer to provide position feedback to an internal control circuit (see Figure 8-1).
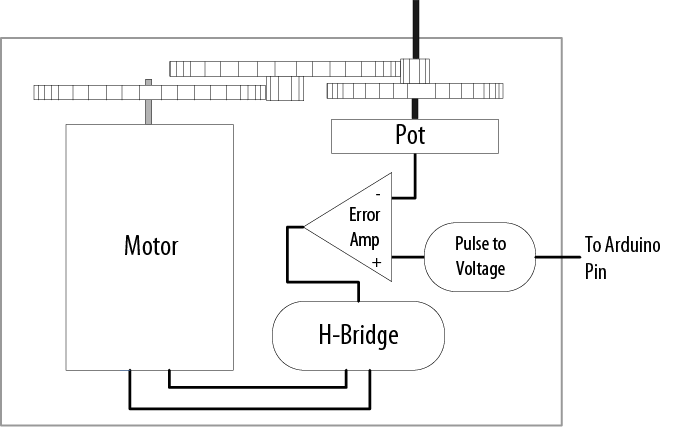
You can get continuous rotation servos that have the positional
feedback disconnected so that you can instruct the servo to rotate
continuously clockwise and counterclockwise with some control over the
speed. These function a little like the brushed motors covered in
Recipe 8.3, except that
continuous rotation servos use the servo library code instead of
analogWrite.
Servos respond to changes in the duration of a pulse. A short pulse of 1 ms or less will cause the servo to rotate to one extreme; a pulse duration of 2 ms or so will rotate the servo to the other extreme ...
Get Arduino Cookbook now with the O’Reilly learning platform.
O’Reilly members experience books, live events, courses curated by job role, and more from O’Reilly and nearly 200 top publishers.

