3.9 GAUSSIAN ELIMINATION
Let A = (ai,j be an n × n matrix and x = (x1, x2,…, xn), y = (y1, y2,…, yn) be n-vectors, all with real number entries satisfying
![]()
If det(A) ≠ 0, then for every y, the linear system of Equations (3.20) has a unique solution x,
![]()
Gaussian elimination is a process in which transformations are applied to an invertible matrix A to produce the identity matrix I and thereby obtain the solution for x in Equation (3.20).
3.9.1 Elementary Row and Column Matrix Transformations
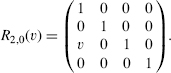
- Rr,s(v) (r ≠ s) is the n × n matrix equal to the identity matrix, except that the element in position (r, s) of Rr,s(v) is v. For example when n = 4
If
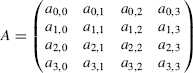
then
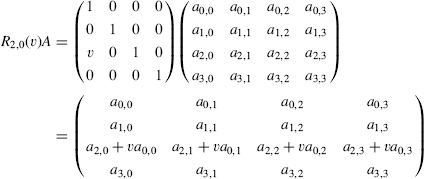
Premultiplication of A by Rr, s(v) replaces the rth row of A by the sum of
- v times the sth row of A and
- The rth row of A.
The inverse of Rr, s(v) is Rr, s(− v).
- Cr, s(v) (r ≠ s) is the n × n matrix, which is equal to the identity matrix except that the element in position (r, s) of Cr,s(v) is v. For example, when n = 4
If
then
Postmultiplication ...
Get Computer Security and Cryptography now with the O’Reilly learning platform.
O’Reilly members experience books, live events, courses curated by job role, and more from O’Reilly and nearly 200 top publishers.

