5.7 MATRIX REPRESENTATION OF ALL STATE EQUATIONS
It is in the form of
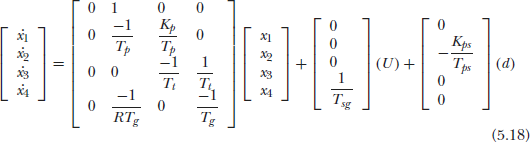
ẋ = Ax + BU + Fd
U – control vector
d – disturbance vector
x – state vector
Equation (5.18) is converted into standard state space model form.
i.e. ẋ = Ax + Bu is written as follows:
If x is made up of the sum of transient and steady state value, and U is also made up of transient and steady state value, then
![]() . then substitute in the equation ẋ = Ax + BU + Fd
. then substitute in the equation ẋ = Ax + BU + Fd
Therefore, ẋ = Ax1 + Axss + BU1 + BUss + Fd (5.19)
If a sudden disturbance occurs and the system reaches the ...
Get Power System Operation and Control now with the O’Reilly learning platform.
O’Reilly members experience books, live events, courses curated by job role, and more from O’Reilly and nearly 200 top publishers.

