2.2 Classical Electrical Drive Control Methods
In the control of electrical drives there are two main control schemes that have dominated high-performance applications during the last few decades: field-oriented control (FOC) [5–7] and direct torque control (DTC) [8]. These control strategies will be presented in the next two sections and will be considered for comparison to the predictive control schemes for electrical drives presented later in this book.
2.2.1 Field Oriented Control
The main idea behind FOC is the use of a proper coordinate system that allows decoupled control over the electrical torque Te and the magnitude of the rotor flux |Ψr|. This can be achieved by aligning the coordinate system with the rotor flux.
Figure 2.9 shows the relation between the stationary αβ and rotating reference frame dq, which is aligned with the rotor flux vector Ψr.
Figure 2.9 Reference frame orientation in FOC
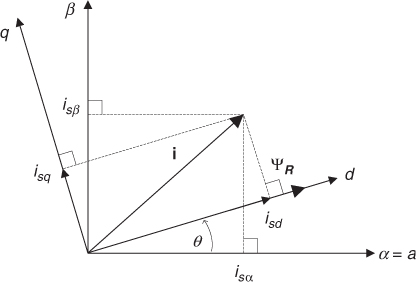
Since the variables are expressed in a rotating coordinates frame, the electromagnetic torque can be controlled via the imaginary component of the stator current isq and the rotor flux magnitude is controlled by its real part isd. These relations are obtained from the machine model expressed in the rotating coordinates frame:
2.7 ![]()
2.8
where τr is the time constant of the rotor [7]. ...
Get Predictive Control of Power Converters and Electrical Drives now with the O’Reilly learning platform.
O’Reilly members experience books, live events, courses curated by job role, and more from O’Reilly and nearly 200 top publishers.

