C.3 z-TRANSFORM
Definition: z-Transform X(z) The z-transform of x[k] for ![]() is
is
(C.23) ![]()
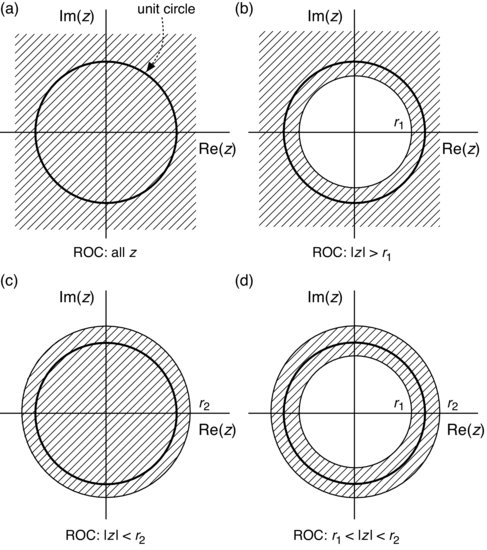
where ![]() is a complex variable. The sum converges to X(z) for some ROC on the z-plane as depicted in Figure C.3 for the four basic types of sequences.
is a complex variable. The sum converges to X(z) for some ROC on the z-plane as depicted in Figure C.3 for the four basic types of sequences.
FIGURE C.3 z-plane and ROCs for X(z). The unit circle is defined by |z| = 1. (a) Finite-duration sequence. (b) Right-sided sequence. (c) Left-sided sequence. (d) Two-sided sequence. A sequence is bounded (stable) if the ROC includes the unit circle, which means r1<1 and r2>1. The z-transform does not exist if r1>r2.
The mapping from the s-plane to the z-plane when a continuous-time signal x(t) is uniformly sampled to generate the discrete-time sequence x[k] is described in Chapter 1. For the unilateral Laplace transform, the integral has a finite lower limit, usually zero:
(C.24) ![]()
The unilateral and bilateral z-transforms are identical when x[k] is nonzero only for , which can be emphasized by writing x[k]u[k], where u[k] is the discrete unit-step function. ...
Get Probability, Random Variables, and Random Processes: Theory and Signal Processing Applications now with the O’Reilly learning platform.
O’Reilly members experience books, live events, courses curated by job role, and more from O’Reilly and nearly 200 top publishers.

