160 Camera Imaging and Conformal Transformations
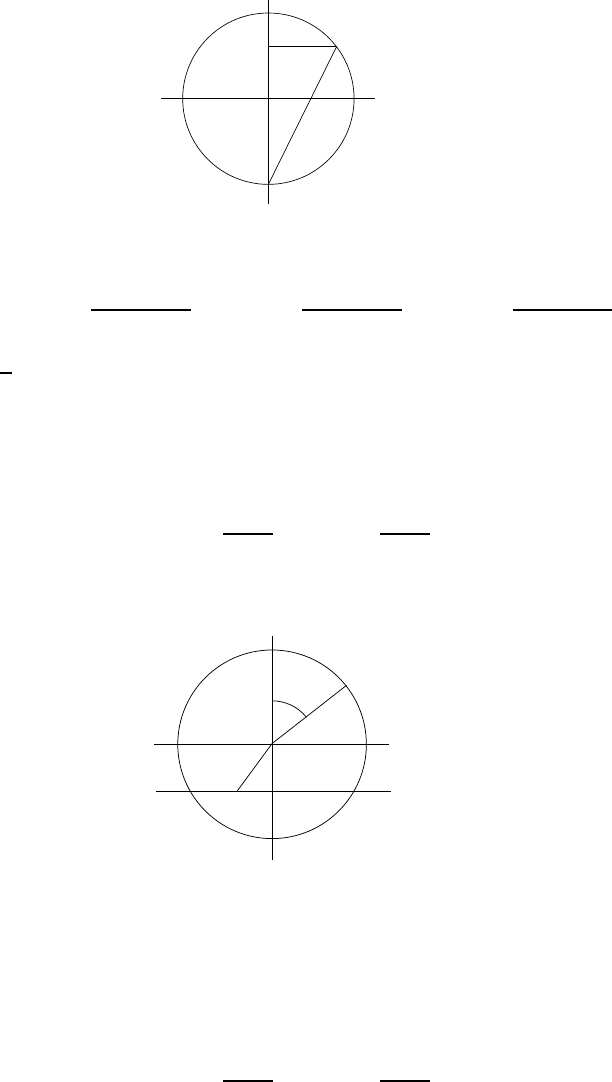
Z
O
(X, Y, Z)
(x, y)
−1
1
FIGURE 9.20 Stereographic projection of a unit sphere from the south pole.
X =
2x
1 + x
2
+ y
2
, Y =
2y
1 + x
2
+ y
2
, Z =
1 − x
2
− y
2
1 + x
2
+ y
2
.
(2) Show that this corresp ondence is an inversion with respect to a sphere of radius
√
2 surr ounding the south pole (0, 0, −1).
9.2. Consider an xyz coordinate system associated with the fisheye lens camera that satis-
fies Eq. (9.7) with the or igin O at its lens center and the z-axis along its optical axis.
Show that a point (X, Y, Z) on a unit sphere surrounding the orig in is imaged at a
point (x, y) given by
x =
2fX
1 + Z
, y =
2fY
1 + Z
,
where we assume ...






