The nice thing about progress is how fast it happens when lawyers and committees arenât involved. Just a few sentences ago, we were dreaming of a better protocol that would fix the world. And here we have it: the Majordomo Protocol.
This one-page specification turns PPP into something more solid (Figure 4-4). This is how we should design complex architectures: start by writing down the contracts, and only then write software to implement them.
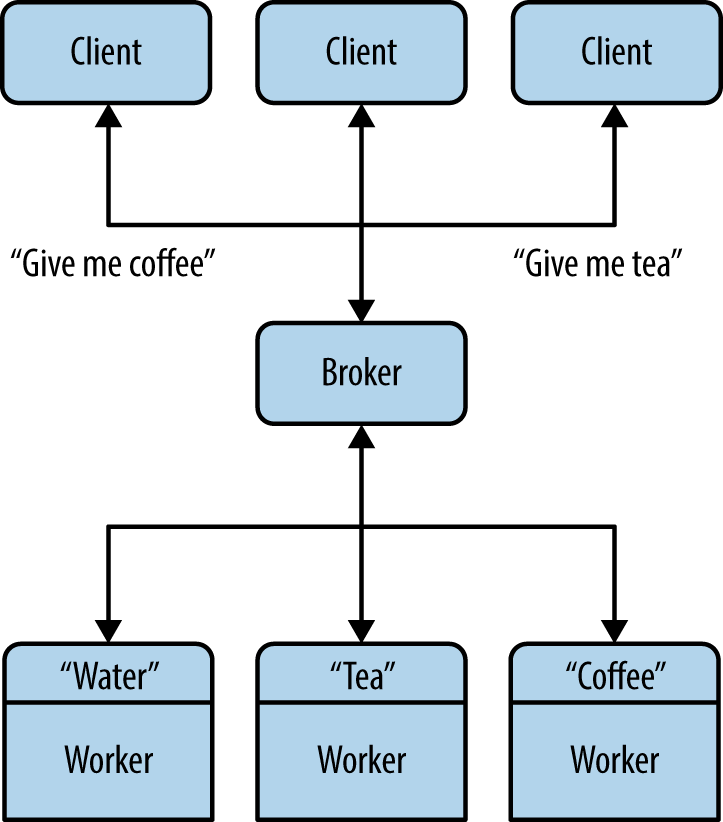
The Majordomo Protocol (MDP) extends and improves on PPP in one interesting way: it adds a âservice nameâ to requests that the client sends, and asks workers to register for specific services. Adding service names turns our Paranoid Pirate queue into a service-oriented broker. The nice thing about MDP is that it came out of working code, a simpler ancestor protocol (PPP), and a precise set of improvements. This made it easy to draft.
To implement Majordomo, we need to write a framework for clients and workers. Itâs really not sane to ask every application developer to read the spec and make it work, when they could be using a simpler API built and tested just once.
So while our first contract (MDP itself) defines how the pieces of our distributed architecture talk to each other, our second contract defines how user applications talk to the technical framework weâre going to design.
Majordomo has two halves, a client side and a worker side. Since weâll write both client and worker applications, we will need two APIs. Here is a sketch for the client API, using a simple object-oriented approach:
mdcli_t*mdcli_new(char*broker);voidmdcli_destroy(mdcli_t**self_p);zmsg_t*mdcli_send(mdcli_t*self,char*service,zmsg_t**request_p);
Thatâs it. We open a session to the broker, send a request message, get a reply message back, and eventually close the connection. Hereâs a sketch for the worker API:
mdwrk_t*mdwrk_new(char*broker,char*service);voidmdwrk_destroy(mdwrk_t**self_p);zmsg_t*mdwrk_recv(mdwrk_t*self,zmsg_t*reply);
Itâs more or less symmetrical, but the worker dialog is a little
different. The first time a worker does a recv(), it
passes a null reply. Thereafter, it passes the current reply and gets a
new request.
The client and worker APIs were fairly simple to construct because theyâre heavily based on the Paranoid Pirate code we already developed. The client API is shown in Example 4-18.
Example 4-18. Majordomo client API (mdcliapi.c)
/* =====================================================================* mdcliapi.c - Majordomo Protocol Client API* Implements the MDP/Worker spec at http://rfc.zeromq.org/spec:7.* ===================================================================== */#include "mdcliapi.h"// Structure of our class// We access these properties only via class methodsstruct_mdcli_t{zctx_t*ctx;// Our contextchar*broker;void*client;// Socket to brokerintverbose;// Print activity to stdoutinttimeout;// Request timeoutintretries;// Request retries};// ---------------------------------------------------------------------// Connect or reconnect to brokervoids_mdcli_connect_to_broker(mdcli_t*self){if(self->client)zsocket_destroy(self->ctx,self->client);self->client=zsocket_new(self->ctx,ZMQ_REQ);zmq_connect(self->client,self->broker);if(self->verbose)zclock_log("I: connecting to broker at %s...",self->broker);}
Example 4-19 presents the constructor and
destructor for our mdcli class.
Example 4-19. Majordomo client API (mdcliapi.c): constructor and destructor
// ---------------------------------------------------------------------// Constructormdcli_t*mdcli_new(char*broker,intverbose){assert(broker);mdcli_t*self=(mdcli_t*)zmalloc(sizeof(mdcli_t));self->ctx=zctx_new();self->broker=strdup(broker);self->verbose=verbose;self->timeout=2500;// msecself->retries=3;// Before we abandons_mdcli_connect_to_broker(self);returnself;}// ---------------------------------------------------------------------// Destructorvoidmdcli_destroy(mdcli_t**self_p){assert(self_p);if(*self_p){mdcli_t*self=*self_p;zctx_destroy(&self->ctx);free(self->broker);free(self);*self_p=NULL;}}
These are the class methods. We can set the request timeout and number of retry attempts before sending requests, as shown in Example 4-20.
Example 4-20. Majordomo client API (mdcliapi.c): configure retry behavior
// ---------------------------------------------------------------------// Set request timeoutvoidmdcli_set_timeout(mdcli_t*self,inttimeout){assert(self);self->timeout=timeout;}// ---------------------------------------------------------------------// Set request retriesvoidmdcli_set_retries(mdcli_t*self,intretries){assert(self);self->retries=retries;}
Example 4-21 and 4-22 show the
send method. It sends a request to the broker and gets
a reply even if it has to retry several times. It takes ownership of the
request message, and destroys it when sent. It returns the reply message,
or NULL if there was no reply after multiple
attempts.
Example 4-21. Majordomo client API (mdcliapi.c): send request and wait for reply
zmsg_t*mdcli_send(mdcli_t*self,char*service,zmsg_t**request_p){assert(self);assert(request_p);zmsg_t*request=*request_p;// Prefix request with protocol frames// Frame 1: "MDPCxy" (six bytes, MDP/Client x.y)// Frame 2: Service name (printable string)zmsg_pushstr(request,service);zmsg_pushstr(request,MDPC_CLIENT);if(self->verbose){zclock_log("I: send request to '%s' service:",service);zmsg_dump(request);}intretries_left=self->retries;while(retries_left&&!zctx_interrupted){zmsg_t*msg=zmsg_dup(request);zmsg_send(&msg,self->client);zmq_pollitem_titems[]={{self->client,0,ZMQ_POLLIN,0}};
On any blocking call, libzmq will return
-1 if there was an error. We could in theory check for
different error codes, but in practice itâs okay to assume it was
EINTR (Ctrl-C). The body of our send
method is shown in Example 4-22.
Example 4-22. Majordomo client API (mdcliapi.c): body of send
intrc=zmq_poll(items,1,self->timeout*ZMQ_POLL_MSEC);if(rc==-1)break;// Interrupted// If we got a reply, process itif(items[0].revents&ZMQ_POLLIN){zmsg_t*msg=zmsg_recv(self->client);if(self->verbose){zclock_log("I: received reply:");zmsg_dump(msg);}// We would handle malformed replies better in real codeassert(zmsg_size(msg)>=3);zframe_t*header=zmsg_pop(msg);assert(zframe_streq(header,MDPC_CLIENT));zframe_destroy(&header);zframe_t*reply_service=zmsg_pop(msg);assert(zframe_streq(reply_service,service));zframe_destroy(&reply_service);zmsg_destroy(&request);returnmsg;// Success}elseif(--retries_left){if(self->verbose)zclock_log("W: no reply, reconnecting...");s_mdcli_connect_to_broker(self);}else{if(self->verbose)zclock_log("W: permanent error, abandoning");break;// Give up}}if(zctx_interrupted)printf("W: interrupt received, killing client...\n");zmsg_destroy(&request);returnNULL;}
Letâs see how the client API looks in action, with an example test program (Example 4-23) that does 100K request-reply cycles.
Example 4-23. Majordomo client application (mdclient.c)
//// Majordomo Protocol client example// Uses the mdcli API to hide all MDP aspects//// Lets us build this source without creating a library#include "mdcliapi.c"intmain(intargc,char*argv[]){intverbose=(argc>1&&streq(argv[1],"-v"));mdcli_t*session=mdcli_new("tcp://localhost:5555",verbose);intcount;for(count=0;count<100000;count++){zmsg_t*request=zmsg_new();zmsg_pushstr(request,"Hello world");zmsg_t*reply=mdcli_send(session,"echo",&request);if(reply)zmsg_destroy(&reply);elsebreak;// Interrupt or failure}printf("%d requests/replies processed\n",count);mdcli_destroy(&session);return0;}
The worker API is presented in Example 4-24 through 4-30.
Example 4-24. Majordomo worker API (mdwrkapi.c)
/* =====================================================================* mdwrkapi.c - Majordomo Protocol Worker API* Implements the MDP/Worker spec at http://rfc.zeromq.org/spec:7.* ===================================================================== */#include "mdwrkapi.h"// Reliability parameters#define HEARTBEAT_LIVENESS 3// 3-5 is reasonable
Example 4-25 shows is the structure of a worker API instance. We use a pseudo object-oriented approach in a lot of the C examples, as well as the CZMQ binding.
Example 4-25. Majordomo worker API (mdwrkapi.c): worker class structure
// Structure of our class// We access these properties only via class methodsstruct_mdwrk_t{zctx_t*ctx;// Our contextchar*broker;char*service;void*worker;// Socket to brokerintverbose;// Print activity to stdout// Heartbeat managementuint64_theartbeat_at;// When to send HEARTBEATsize_tliveness;// How many attempts leftintheartbeat;// Heartbeat delay, in msecintreconnect;// Reconnect delay, in msecintexpect_reply;// Zero only at startzframe_t*reply_to;// Return identity, if any};
We have two utility functions, to send a message to the broker and to (re)connect to the broker, as you can see in Example 4-26.
Example 4-26. Majordomo worker API (mdwrkapi.c): utility functions
// ---------------------------------------------------------------------// Send message to broker// If no msg is provided, creates one internallystaticvoids_mdwrk_send_to_broker(mdwrk_t*self,char*command,char*option,zmsg_t*msg){msg=msg?zmsg_dup(msg):zmsg_new();// Stack protocol envelope to start of messageif(option)zmsg_pushstr(msg,option);zmsg_pushstr(msg,command);zmsg_pushstr(msg,MDPW_WORKER);zmsg_pushstr(msg,"");if(self->verbose){zclock_log("I: sending %s to broker",mdps_commands[(int)*command]);zmsg_dump(msg);}zmsg_send(&msg,self->worker);}// ---------------------------------------------------------------------// Connect or reconnect to brokervoids_mdwrk_connect_to_broker(mdwrk_t*self){if(self->worker)zsocket_destroy(self->ctx,self->worker);self->worker=zsocket_new(self->ctx,ZMQ_DEALER);zmq_connect(self->worker,self->broker);if(self->verbose)zclock_log("I: connecting to broker at %s...",self->broker);// Register service with brokers_mdwrk_send_to_broker(self,MDPW_READY,self->service,NULL);// If liveness hits zero, queue is considered disconnectedself->liveness=HEARTBEAT_LIVENESS;self->heartbeat_at=zclock_time()+self->heartbeat;}
Example 4-27 presents the constructor and
destructor for our mdwrk class.
Example 4-27. Majordomo worker API (mdwrkapi.c): constructor and destructor
// ---------------------------------------------------------------------// Constructormdwrk_t*mdwrk_new(char*broker,char*service,intverbose){assert(broker);assert(service);mdwrk_t*self=(mdwrk_t*)zmalloc(sizeof(mdwrk_t));self->ctx=zctx_new();self->broker=strdup(broker);self->service=strdup(service);self->verbose=verbose;self->heartbeat=2500;// msecself->reconnect=2500;// msecs_mdwrk_connect_to_broker(self);returnself;}// ---------------------------------------------------------------------// Destructorvoidmdwrk_destroy(mdwrk_t**self_p){assert(self_p);if(*self_p){mdwrk_t*self=*self_p;zctx_destroy(&self->ctx);free(self->broker);free(self->service);free(self);*self_p=NULL;}}
We provide two methods to configure the worker API. You can set the heartbeat interval and retries to match the expected network performance (Example 4-28).
Example 4-28. Majordomo worker API (mdwrkapi.c): configure worker
// ---------------------------------------------------------------------// Set heartbeat delayvoidmdwrk_set_heartbeat(mdwrk_t*self,intheartbeat){self->heartbeat=heartbeat;}// ---------------------------------------------------------------------// Set reconnect delayvoidmdwrk_set_reconnect(mdwrk_t*self,intreconnect){self->reconnect=reconnect;}
Example 4-29 shows the recv
method; itâs a little misnamed since it first sends any reply and then
waits for a new request. If you have a better name for this, let me
know!
Example 4-29. Majordomo worker API (mdwrkapi.c): recv method
// ---------------------------------------------------------------------// Send reply, if any, to broker and wait for next request.zmsg_t*mdwrk_recv(mdwrk_t*self,zmsg_t**reply_p){// Format and send the reply if we were provided oneassert(reply_p);zmsg_t*reply=*reply_p;assert(reply||!self->expect_reply);if(reply){assert(self->reply_to);zmsg_wrap(reply,self->reply_to);s_mdwrk_send_to_broker(self,MDPW_REPLY,NULL,reply);zmsg_destroy(reply_p);}self->expect_reply=1;while(true){zmq_pollitem_titems[]={{self->worker,0,ZMQ_POLLIN,0}};intrc=zmq_poll(items,1,self->heartbeat*ZMQ_POLL_MSEC);if(rc==-1)break;// Interruptedif(items[0].revents&ZMQ_POLLIN){zmsg_t*msg=zmsg_recv(self->worker);if(!msg)break;// Interruptedif(self->verbose){zclock_log("I: received message from broker:");zmsg_dump(msg);}self->liveness=HEARTBEAT_LIVENESS;// Don't try to handle errors, just assert noisilyassert(zmsg_size(msg)>=3);zframe_t*empty=zmsg_pop(msg);assert(zframe_streq(empty,""));zframe_destroy(&empty);zframe_t*header=zmsg_pop(msg);assert(zframe_streq(header,MDPW_WORKER));zframe_destroy(&header);zframe_t*command=zmsg_pop(msg);if(zframe_streq(command,MDPW_REQUEST)){// We should pop and save as many addresses as there are// up to a null part, but for now, just save one...self->reply_to=zmsg_unwrap(msg);zframe_destroy(&command);
Finally, here is where we actually have a message to process; as shown in Example 4-30, we return it to the caller application.
Example 4-30. Majordomo worker API (mdwrkapi.c): process message
returnmsg;ÂÂ// Â We have a request to process}elseif(zframe_streq(command,MDPW_HEARTBEAT));// Do nothing for heartbeatselseif(zframe_streq(command,MDPW_DISCONNECT))s_mdwrk_connect_to_broker(self);else{zclock_log("E: invalid input message");zmsg_dump(msg);}zframe_destroy(&command);zmsg_destroy(&msg);}elseif(--self->liveness==0){if(self->verbose)zclock_log("W: disconnected from broker - retrying...");zclock_sleep(self->reconnect);s_mdwrk_connect_to_broker(self);}// Send HEARTBEAT if it's timeif(zclock_time()>self->heartbeat_at){s_mdwrk_send_to_broker(self,MDPW_HEARTBEAT,NULL,NULL);self->heartbeat_at=zclock_time()+self->heartbeat;}}if(zctx_interrupted)printf("W: interrupt received, killing worker...\n");returnNULL;}
Letâs see how the worker API looks in action with an example test program (Example 4-31) that implements an echo service.
Example 4-31. Majordomo worker application (mdworker.c)
//// Majordomo Protocol worker example// Uses the mdwrk API to hide all MDP aspects//// Lets us build this source without creating a library#include "mdwrkapi.c"intmain(intargc,char*argv[]){intverbose=(argc>1&&streq(argv[1],"-v"));mdwrk_t*session=mdwrk_new("tcp://localhost:5555","echo",verbose);zmsg_t*reply=NULL;while(true){zmsg_t*request=mdwrk_recv(session,&reply);if(request==NULL)break;// Worker was interruptedreply=request;// Echo is complex... :-)}mdwrk_destroy(&session);return0;}
Here are some things to note about the worker API code:
The APIs are single-threaded. This means, for example, that the worker wonât send heartbeats in the background. Happily, this is exactly what we want: if the worker application gets stuck, heartbeats will stop and the broker will stop sending requests to the worker.
The worker API doesnât do an exponential backoff; itâs not worth the extra complexity.
The APIs donât do any error reporting. If something isnât as expected, they raise an assertion (or exception, depending on the language). This is ideal for a reference implementation, so any protocol errors show immediately. For real applications, the API should be robust against invalid messages.
You might wonder why the worker API is manually closing its socket and opening a new one, when ÃMQ will automatically reconnect a socket if the peer disappears and comes back. Look back at the Simple Pirate and Paranoid Pirate workers to understand. Although ÃMQ will automatically reconnect workers if the broker dies and comes back up, this isnât sufficient to re-register the workers with the broker. I know of at least two solutions. The simplest, which we use here, is for the worker to monitor the connection using heartbeats and, if it decides the broker is dead, to close its socket and start afresh with a new socket. The alternative is for the broker to challenge unknown workers when it gets a heartbeat from them and ask them to re-register. That would require protocol support.
Now letâs design the Majordomo broker. Its core structure is a set of queues, one per service. We will create these queues as workers appear (we could delete them as workers disappear, but forget that for now because it gets complex). Additionally, we will keep a queue of workers per service.
The code for the broker is shown in Example 4-32.
Example 4-32. Majordomo broker (mdbroker.c)
//// Majordomo Protocol broker// A minimal C implementation of the Majordomo Protocol as defined in// http://rfc.zeromq.org/spec:7 and http://rfc.zeromq.org/spec:8.//#include "czmq.h"#include "mdp.h"// We'd normally pull these from config data#define HEARTBEAT_LIVENESS 3// 3-5 is reasonable#define HEARTBEAT_INTERVAL 2500// msec#define HEARTBEAT_EXPIRY HEARTBEAT_INTERVAL * HEARTBEAT_LIVENESS
The broker class (Example 4-33) defines a single broker instance.
Example 4-33. Majordomo broker (mdbroker.c): broker class structure
typedefstruct{zctx_t*ctx;// Our contextvoid*socket;// Socket for clients & workersintverbose;// Print activity to stdoutchar*endpoint;// Broker binds to this endpointzhash_t*services;// Hash of known serviceszhash_t*workers;// Hash of known workerszlist_t*waiting;// List of waiting workersuint64_theartbeat_at;// When to send HEARTBEAT}broker_t;staticbroker_t*s_broker_new(intverbose);staticvoids_broker_destroy(broker_t**self_p);staticvoids_broker_bind(broker_t*self,char*endpoint);staticvoids_broker_worker_msg(broker_t*self,zframe_t*sender,zmsg_t*msg);staticvoids_broker_client_msg(broker_t*self,zframe_t*sender,zmsg_t*msg);staticvoids_broker_purge(broker_t*self);
The service class (Example 4-34) defines a single service instance.
Example 4-34. Majordomo broker (mdbroker.c): service class structure
typedefstruct{broker_t*broker;// Broker instancechar*name;// Service namezlist_t*requests;// List of client requestszlist_t*waiting;// List of waiting workerssize_tworkers;// How many workers we have}service_t;staticservice_t*s_service_require(broker_t*self,zframe_t*service_frame);staticvoids_service_destroy(void*argument);staticvoids_service_dispatch(service_t*service,zmsg_t*msg);
The worker class (Example 4-35) defines a single worker, idle or active.
Example 4-35. Majordomo broker (mdbroker.c): worker class structure
typedefstruct{broker_t*broker;// Broker instancechar*id_string;// Identity of worker as stringzframe_t*identity;// Identity frame for routingservice_t*service;// Owning service, if knownint64_texpiry;// When a worker expires, if no heartbeat}worker_t;staticworker_t*s_worker_require(broker_t*self,zframe_t*identity);staticvoids_worker_delete(worker_t*self,intdisconnect);staticvoids_worker_destroy(void*argument);staticvoids_worker_send(worker_t*self,char*command,char*option,zmsg_t*msg);staticvoids_worker_waiting(worker_t*self);
The constructor and destructor for the broker are shown in Example 4-36.
Example 4-36. Majordomo broker (mdbroker.c): broker constructor and destructor
staticbroker_t*s_broker_new(intverbose){broker_t*self=(broker_t*)zmalloc(sizeof(broker_t));// Initialize broker stateself->ctx=zctx_new();self->socket=zsocket_new(self->ctx,ZMQ_ROUTER);self->verbose=verbose;self->services=zhash_new();self->workers=zhash_new();self->waiting=zlist_new();self->heartbeat_at=zclock_time()+HEARTBEAT_INTERVAL;returnself;}staticvoids_broker_destroy(broker_t**self_p){assert(self_p);if(*self_p){broker_t*self=*self_p;zctx_destroy(&self->ctx);zhash_destroy(&self->services);zhash_destroy(&self->workers);zlist_destroy(&self->waiting);free(self);*self_p=NULL;}}
The bind method, shown in Example 4-37, binds the broker instance to an endpoint. We
can call this multiple times. Note that MDP uses a single socket for both
clients and workers.
Example 4-37. Majordomo broker (mdbroker.c): broker bind method
voids_broker_bind(broker_t*self,char*endpoint){zsocket_bind(self->socket,endpoint);zclock_log("I: MDP broker/0.2.0 is active at %s",endpoint);}
The worker_msg method shown in Example 4-38 processes one READY, REPLY, HEARTBEAT, or
DISCONNECT message sent to the broker by a worker.
Example 4-38. Majordomo broker (mdbroker.c): broker worker_msg method
staticvoids_broker_worker_msg(broker_t*self,zframe_t*sender,zmsg_t*msg){assert(zmsg_size(msg)>=1);// At least, commandzframe_t*command=zmsg_pop(msg);char*id_string=zframe_strhex(sender);intworker_ready=(zhash_lookup(self->workers,id_string)!=NULL);free(id_string);worker_t*worker=s_worker_require(self,sender);if(zframe_streq(command,MDPW_READY)){if(worker_ready)// Not first command in sessions_worker_delete(worker,1);elseif(zframe_size(sender)>=4// Reserved service name&&memcmp(zframe_data(sender),"mmi.",4)==0)s_worker_delete(worker,1);else{// Attach worker to service and mark as idlezframe_t*service_frame=zmsg_pop(msg);worker->service=s_service_require(self,service_frame);worker->service->workers++;s_worker_waiting(worker);zframe_destroy(&service_frame);}}elseif(zframe_streq(command,MDPW_REPLY)){if(worker_ready){// Remove and save client return envelope and insert the// protocol header and service name, then rewrap envelopezframe_t*client=zmsg_unwrap(msg);zmsg_pushstr(msg,worker->service->name);zmsg_pushstr(msg,MDPC_CLIENT);zmsg_wrap(msg,client);zmsg_send(&msg,self->socket);s_worker_waiting(worker);}elses_worker_delete(worker,1);}elseif(zframe_streq(command,MDPW_HEARTBEAT)){if(worker_ready)worker->expiry=zclock_time()+HEARTBEAT_EXPIRY;elses_worker_delete(worker,1);}elseif(zframe_streq(command,MDPW_DISCONNECT))s_worker_delete(worker,0);else{zclock_log("E: invalid input message");zmsg_dump(msg);}free(command);zmsg_destroy(&msg);}
Example 4-39 shows how we process a request
coming from a client. We implement Majordomo Management Interface (MMI)
requests directly here (at present, only the
mmi.service request).
Example 4-39. Majordomo broker (mdbroker.c): broker client_msg method
staticvoids_broker_client_msg(broker_t*self,zframe_t*sender,zmsg_t*msg){assert(zmsg_size(msg)>=2);// Service name + bodyzframe_t*service_frame=zmsg_pop(msg);service_t*service=s_service_require(self,service_frame);// Set reply return identity to client senderzmsg_wrap(msg,zframe_dup(sender));// If we got an MMI service request, process that internallyif(zframe_size(service_frame)>=4&&memcmp(zframe_data(service_frame),"mmi.",4)==0){char*return_code;if(zframe_streq(service_frame,"mmi.service")){char*name=zframe_strdup(zmsg_last(msg));service_t*service=(service_t*)zhash_lookup(self->services,name);return_code=service&&service->workers?"200":"404";free(name);}elsereturn_code="501";zframe_reset(zmsg_last(msg),return_code,strlen(return_code));// Remove & save client return envelope and insert the// protocol header and service name, then rewrap envelopezframe_t*client=zmsg_unwrap(msg);zmsg_push(msg,zframe_dup(service_frame));zmsg_pushstr(msg,MDPC_CLIENT);zmsg_wrap(msg,client);zmsg_send(&msg,self->socket);}else// Else dispatch the message to the requested services_service_dispatch(service,msg);zframe_destroy(&service_frame);}
The purge method, shown in Example 4-40, deletes any idle workers that havenât pinged us
in a while. We hold workers in order from oldest to most recent, so we can
stop scanning whenever we find a live worker. This means weâll mainly stop
at the first worker, which is essential when we have large numbers of
workers (because we call this method in our critical path).
Example 4-40. Majordomo broker (mdbroker.c): broker purge method
staticvoids_broker_purge(broker_t*self){worker_t*worker=(worker_t*)zlist_first(self->waiting);while(worker){if(zclock_time()<worker->expiry)break;// Worker is alive, we're done hereif(self->verbose)zclock_log("I: deleting expired worker: %s",worker->id_string);s_worker_delete(worker,0);worker=(worker_t*)zlist_first(self->waiting);}}
Example 4-41 shows the implementation of the methods that work on a service.
Example 4-41. Majordomo broker (mdbroker.c): service methods
// Lazy constructor that locates a service by name, or creates a new// service if there is no service already with that namestaticservice_t*s_service_require(broker_t*self,zframe_t*service_frame){assert(service_frame);char*name=zframe_strdup(service_frame);service_t*service=(service_t*)zhash_lookup(self->services,name);if(service==NULL){service=(service_t*)zmalloc(sizeof(service_t));service->broker=self;service->name=name;service->requests=zlist_new();service->waiting=zlist_new();zhash_insert(self->services,name,service);zhash_freefn(self->services,name,s_service_destroy);if(self->verbose)zclock_log("I: added service: %s",name);}elsefree(name);returnservice;}// Service destructor is called automatically whenever the service is// removed from broker->servicesstaticvoids_service_destroy(void*argument){service_t*service=(service_t*)argument;while(zlist_size(service->requests)){zmsg_t*msg=zlist_pop(service->requests);zmsg_destroy(&msg);}zlist_destroy(&service->requests);zlist_destroy(&service->waiting);free(service->name);free(service);}
The dispatch method, shown in Example 4-42, sends requests to waiting workers.
Example 4-42. Majordomo broker (mdbroker.c): service dispatch method
staticvoids_service_dispatch(service_t*self,zmsg_t*msg){assert(self);if(msg)// Queue message, if anyzlist_append(self->requests,msg);s_broker_purge(self->broker);while(zlist_size(self->waiting)&&zlist_size(self->requests)){worker_t*worker=zlist_pop(self->waiting);zlist_remove(self->broker->waiting,worker);zmsg_t*msg=zlist_pop(self->requests);s_worker_send(worker,MDPW_REQUEST,NULL,msg);zmsg_destroy(&msg);}}
Example 4-43 shows the implementation of the methods that work on a worker.
Example 4-43. Majordomo broker (mdbroker.c): worker methods
// Lazy constructor that locates a worker by identity, or creates a new// worker if there is no worker already with that identitystaticworker_t*s_worker_require(broker_t*self,zframe_t*identity){assert(identity);// self->workers is keyed off worker identitychar*id_string=zframe_strhex(identity);worker_t*worker=(worker_t*)zhash_lookup(self->workers,id_string);if(worker==NULL){worker=(worker_t*)zmalloc(sizeof(worker_t));worker->broker=self;worker->id_string=id_string;worker->identity=zframe_dup(identity);zhash_insert(self->workers,id_string,worker);zhash_freefn(self->workers,id_string,s_worker_destroy);if(self->verbose)zclock_log("I: registering new worker: %s",id_string);}elsefree(id_string);returnworker;}// The delete method deletes the current workerstaticvoids_worker_delete(worker_t*self,intdisconnect){assert(self);if(disconnect)s_worker_send(self,MDPW_DISCONNECT,NULL,NULL);if(self->service){zlist_remove(self->service->waiting,self);self->service->workers--;}zlist_remove(self->broker->waiting,self);// This implicitly calls s_worker_destroyzhash_delete(self->broker->workers,self->id_string);}// Worker destructor is called automatically whenever the worker is// removed from broker->workersstaticvoids_worker_destroy(void*argument){worker_t*self=(worker_t*)argument;zframe_destroy(&self->identity);free(self->id_string);free(self);}
The send method (Example 4-44) formats and sends a command to a worker. The
caller may also provide a command option and a message payload.
Example 4-44. Majordomo broker (mdbroker.c): worker send method
staticvoids_worker_send(worker_t*self,char*command,char*option,zmsg_t*msg){msg=msg?zmsg_dup(msg):zmsg_new();// Stack protocol envelope to start of messageif(option)zmsg_pushstr(msg,option);zmsg_pushstr(msg,command);zmsg_pushstr(msg,MDPW_WORKER);// Stack routing envelope to start of messagezmsg_wrap(msg,zframe_dup(self->identity));if(self->broker->verbose){zclock_log("I: sending %s to worker",mdps_commands[(int)*command]);zmsg_dump(msg);}zmsg_send(&msg,self->broker->socket);}// This worker is now waiting for workstaticvoids_worker_waiting(worker_t*self){// Queue to broker and service waiting listsassert(self->broker);zlist_append(self->broker->waiting,self);zlist_append(self->service->waiting,self);self->expiry=zclock_time()+HEARTBEAT_EXPIRY;s_service_dispatch(self->service,NULL);}
Finally, here is the main task. In Example 4-45, we create a new broker instance and then process messages on the broker socket.
Example 4-45. Majordomo broker (mdbroker.c): main task
intmain(intargc,char*argv[]){intverbose=(argc>1&&streq(argv[1],"-v"));broker_t*self=s_broker_new(verbose);s_broker_bind(self,"tcp://*:5555");// Get and process messages forever or until interruptedwhile(true){zmq_pollitem_titems[]={{self->socket,0,ZMQ_POLLIN,0}};intrc=zmq_poll(items,1,HEARTBEAT_INTERVAL*ZMQ_POLL_MSEC);if(rc==-1)break;// Interrupted// Process next input message, if anyif(items[0].revents&ZMQ_POLLIN){zmsg_t*msg=zmsg_recv(self->socket);if(!msg)break;// Interruptedif(self->verbose){zclock_log("I: received message:");zmsg_dump(msg);}zframe_t*sender=zmsg_pop(msg);zframe_t*empty=zmsg_pop(msg);zframe_t*header=zmsg_pop(msg);if(zframe_streq(header,MDPC_CLIENT))s_broker_client_msg(self,sender,msg);elseif(zframe_streq(header,MDPW_WORKER))s_broker_worker_msg(self,sender,msg);else{zclock_log("E: invalid message:");zmsg_dump(msg);zmsg_destroy(&msg);}zframe_destroy(&sender);zframe_destroy(&empty);zframe_destroy(&header);}// Disconnect and delete any expired workers// Send heartbeats to idle workers if neededif(zclock_time()>self->heartbeat_at){s_broker_purge(self);worker_t*worker=(worker_t*)zlist_first(self->waiting);while(worker){s_worker_send(worker,MDPW_HEARTBEAT,NULL,NULL);worker=(worker_t*)zlist_next(self->waiting);}self->heartbeat_at=zclock_time()+HEARTBEAT_INTERVAL;}}if(zctx_interrupted)printf("W: interrupt received, shutting down...\n");s_broker_destroy(&self);return0;}
This is by far the most complex example weâve seen. Itâs almost 500 lines of code; writing this and making it somewhat robust took two days. However, this is still a relatively short piece of code for a full service-oriented broker.
Notes on this code:
The Majordomo Protocol lets us handle both clients and workers on a single socket. This is nicer for those deploying and managing the broker: it just sits on one ÃMQ endpoint rather than the two that most proxies need.
The broker implements all of MDP/0.1 properly (as far as I know), including disconnection if the broker sends invalid commands, heartbeating, and the rest.
It can be extended to run multiple threads, each managing one socket and one set of clients and workers. This could be interesting for segmenting large architectures. The C code is already organized around a broker class to make this trivial.
A primary/failover or live/live broker reliability model is easy, as the broker essentially has no state except service presence. Itâs up to clients and workers to choose another broker if their first choice isnât up and running.
The examples use five-second heartbeats, mainly to reduce the amount of output when you enable tracing. Realistic values would be lower for most LAN applications. However, any retry has to be slow enough to allow for a service to restart, say 10 seconds at least.
We later improved and extended the protocol and the Majordomo implementation, which now sits in its own GitHub project. If you want a properly usable Majordomo stack, use the GitHub project.
Get ZeroMQ now with the O’Reilly learning platform.
O’Reilly members experience books, live events, courses curated by job role, and more from O’Reilly and nearly 200 top publishers.

