February 2019
Intermediate to advanced
254 pages
6h 48m
English
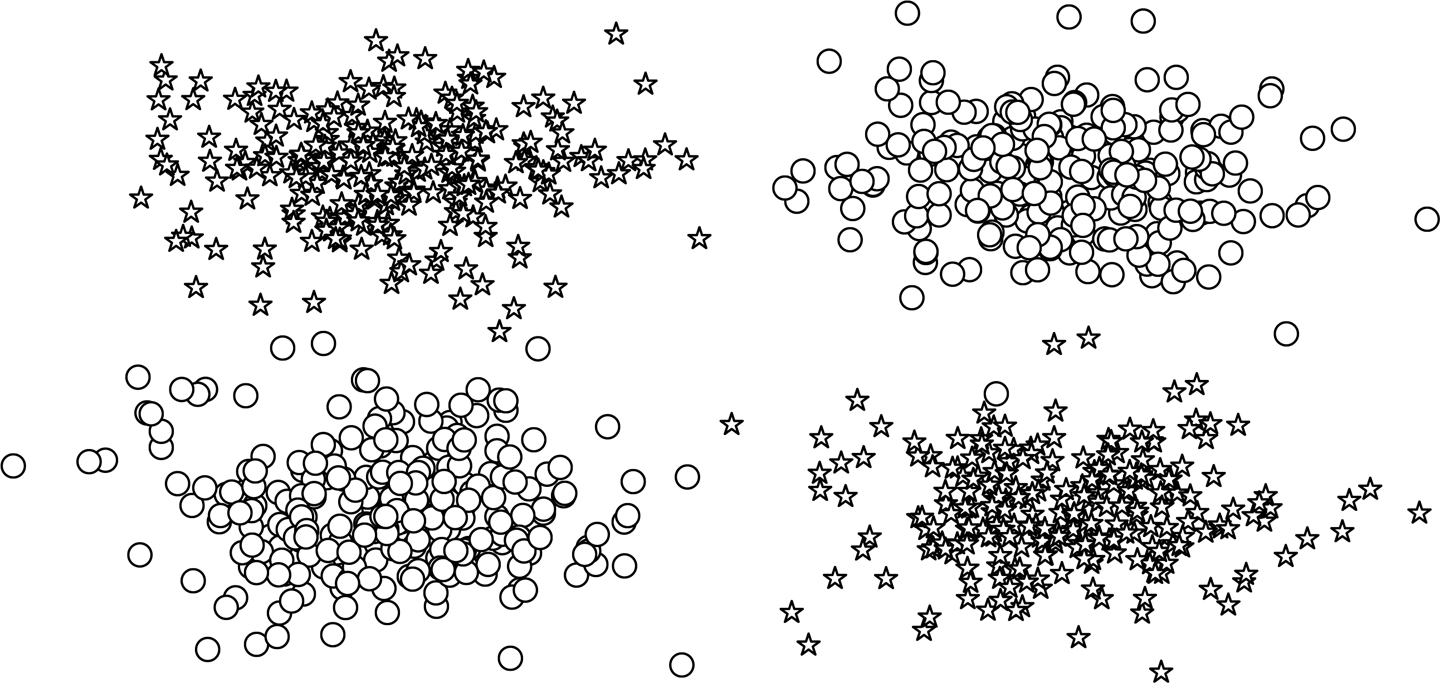
In Chapter 3, we covered the foundations of neural networks by looking at the perceptron, the simplest neural network that can exist. One of the historic downfalls of the perceptron was that it cannot learn modestly nontrivial patterns present in data. For example, take a look at the plotted data points in Figure 4-1. This is equivalent to an either-or (XOR) situation in which the decision boundary cannot be a single straight line (otherwise known as being linearly separable). In this case, the perceptron fails.
In this chapter, we explore a family of neural network models traditionally called feed-forward networks. We focus on two kinds of feed-forward neural networks: the multilayer perceptron (MLP) and the convolutional neural network (CNN).1 The multilayer perceptron structurally extends the simpler perceptron we studied in Chapter 3 by grouping many perceptrons in a single layer and stacking multiple layers together. We cover multilayer perceptrons in just a moment and show their use in multiclass classification in “Example: Surname Classification with an MLP”.
The second kind of feed-forward neural networks studied in this chapter, the convolutional neural network, is deeply inspired ...
Read now
Unlock full access






