8.10. ROBUST CONTROL SYSTEMS [10–14]
Robust control is concerned with determining a stabilizing controller that achieves feedback performance in terms of stability and accuracy requirements, but the control must achieve the performance that is robust (insensitive) to plant uncertainty, parameter variation, and external disturbances. We know from the previous discussion in this book that feedback reduces the effects of external disturbances (Section 2.17) and parameter variations (Section 5.3). However, this is only achieved with relatively high loop gain which limits stability. Robust control is basically the same problem that was addressed in the 1930s by Black, Bode, and Nyquist. Modern robust control revolves around the feedback configurations illustrated in Figures 7.5, 7.6, and 7.7 which illustrate two-degrees-of-freedom compensation systems.
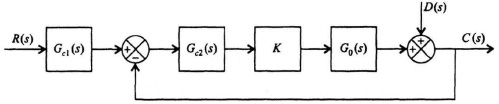
Figure 8.23 Control system with a two-degrees-of-freedom series controller Gc1(s) and a forward-loop-controller Gc2(s).
Let us consider the control system illustrated in Figure 8.23 which contains a disturbance D(s), and it contains a two-degrees-of-freedom series controller Gc1(s) and a forward-loop controller Gc2(s). In this control system’s operation, the amplifier gain, K, can vary.
For this control system, the overall transfer function, C(s)/R(s), is given by
The transfer function relating the disturbance D(s) to the output C
Get Modern Control System Theory and Design, 2nd Edition now with the O’Reilly learning platform.
O’Reilly members experience books, live events, courses curated by job role, and more from O’Reilly and nearly 200 top publishers.

