2.17. DISTURBANCE SIGNALS IN FEEDBACK CONTROL SYSTEMS
A disturbance signal is commonly found in control systems. For example, wind gusts hitting the antenna dish of a tracking radar create large unwanted torques which affect the position of the antenna. Another example, are sea waves hitting a hydrofoil’s foil which create very large unwanted torques which affect the foil’s position. (See Figure 1.30b). Maximum lift for the hydrofoil is achieved when the bow foil is at an optimum angle of approximately 40°. Disturbing this angle by torques created from sea waves crashing into this foil can seriously affect the lift capability of the hydrofoil.
Disturbance signals represent unwanted inputs which affect the control-system’s output, and result in an increase of the system error. It is the job of the control-system engineer to properly design the control system to partially eliminate the affects of disturbances on the output and system error.
Consider the feedback control system shown in Figure 2.19a, which contains four feedback paths and a disturbance input U(s). Its corresponding signal-flow graph is shown in Figure 2.19b. We wish to find the transfer functions C(s)/R(s) and the transfer function of the error due to the disturbance. E1(s)/U(s). By inspection, these transfer functions are given by
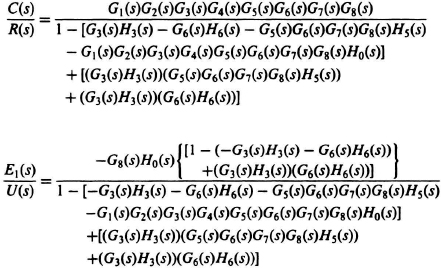
The foregoing examples illustrate the simplifications made possible by use of Mason’s ...
Get Modern Control System Theory and Design, 2nd Edition now with the O’Reilly learning platform.
O’Reilly members experience books, live events, courses curated by job role, and more from O’Reilly and nearly 200 top publishers.

