December 2011
Intermediate to advanced
96 pages
2h 1m
English
Servo motors (Figure 1-4) will be moving the wheels of our robot. The most usual type of servos have limited rotation. They are used when you need to turn the motor to a specific angle. In our robot, we only need to control speed and direction. And, of course, the motor needs to be able to turn freely. Continuous rotation servos are made for this. Almost any servo can be modified to continuous rotation, but it’s easier to buy a ready-made version.
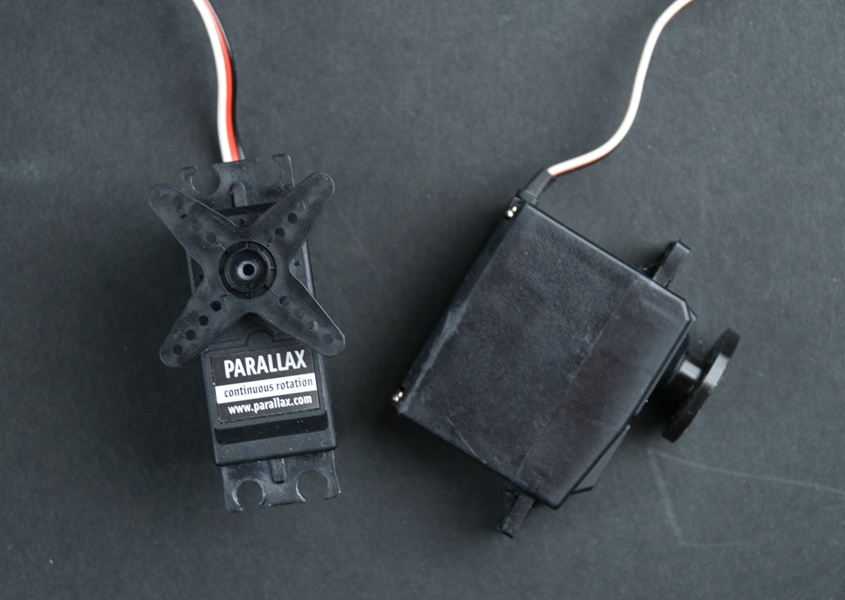
Figure 1-4. Continuous rotation servos
The Parallax (Futaba) continuous rotation servo is perfect for our needs. It has an external potentiometer adjustment screw, which allows identical centering of two servos effortlessly. You’ll notice how handy this is later, when we program the movements for the robot.
If you want to learn how to modify any servo to continuous rotation, read the Soccer Robot chapter in our book Make: Arduino Bots and Gadgets (MABG), published by O’Reilly (2011).
We’re going to use regular L-brackets to attach the servos. Attach two brackets to each servo with 3x10 mm screws, as shown in Figure 1-5.
If you can’t find suitable L-brackets, you can make them from metal strips. For example, you could salvage some strips from an old typewriter, drill holes that match your servo, and bend them to a 90° angle in the middle.
Figure 1-5. L-brackets attached to servo
Read now
Unlock full access






