September 2008
Beginner to intermediate
580 pages
20h 7m
English
Structure from motion is an important topic in mobile robotics as well as in the analysis of more general video imagery such as might come from a handheld camcorder. The topic of structure from motion is a broad one, and a great deal of research has been done in this field. However, much can be accomplished by making one simple observation: In a static scene, an image taken by a camera that has moved is no different than an image taken by a second camera. Thus all of our intuition, as well as our mathematical and algorithmic machinery, is immediately portable to this situation. Of course, the descriptor "static" is crucial, but in many practical situations the scene is either static or sufficiently static that the few moved points can be treated as outliers by robust fitting methods.
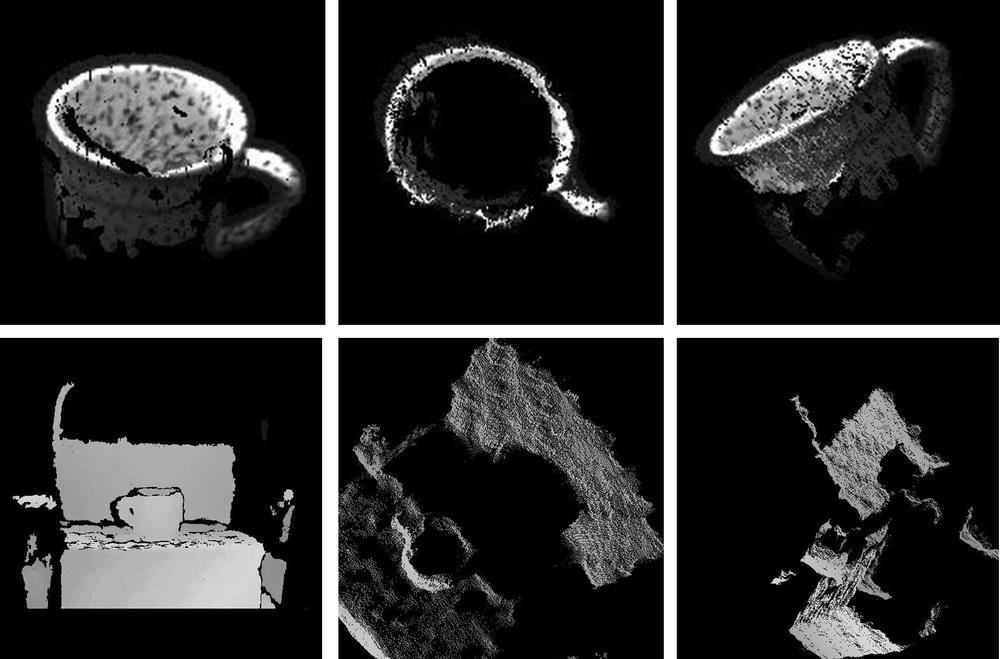
Figure 12-17. Example output of depth maps (for a mug and a chair) computed using cvFindStereoCorrespondenceBM() and cvReprojectImageTo3D() (image courtesy of Willow Garage)
Consider the case of a camera moving through a building. If the environment is
relatively rich in recognizable features, as might be found with optical flow techniques such as cvCalcOpticalFlowPyrLK(), then we should be able to compute correspondences
between enough points—from frame to frame—to reconstruct not only the trajectory of the
camera (this information is encoded in the essential matrix E, which can be ...
Read now
Unlock full access






