85Unconstrained Optimization
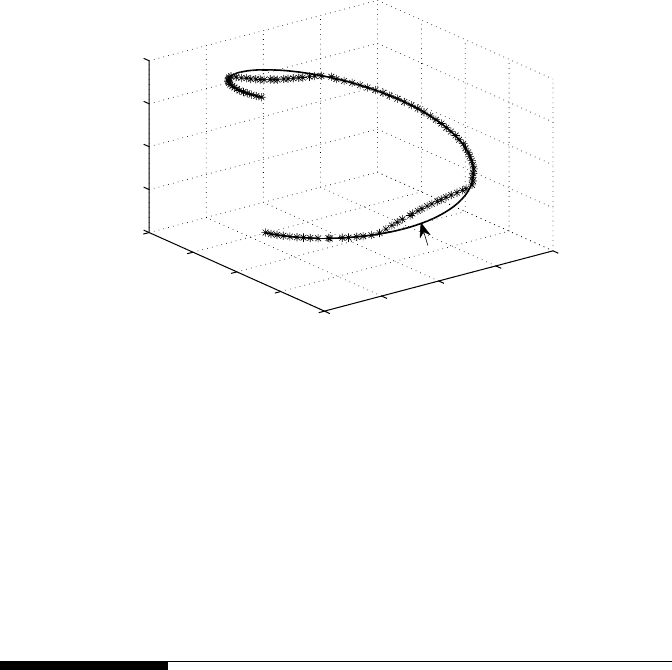
robotics_nominal_traj.m. The desired (nominal shown by solid line) and opti-
mized (shown by *) trajectories are compared in Figure 3.16. It is observed
that in some regions, the motion of the end-effector is not exactly matched
with the desired prole. Similar results are also seen in Andreas (2007),
where the reason for the difference is attributed to “beyond manipulators
reach.”
Chapter Highlights
• The unidirectional search refers to minimizing the value of a multi-
variable function along a specied direction.
• Solution techniques for multivariable, unconstrained optimization
problems can be grou ...






