October 2000
Intermediate to advanced
288 pages
9h 22m
English
Figure 7.13 presents the architecture of the CA-based scheduler. The scheduler operates in two modes: the learning mode (Fig. 7.13, left) and the operation mode (Fig. 7.13, right).
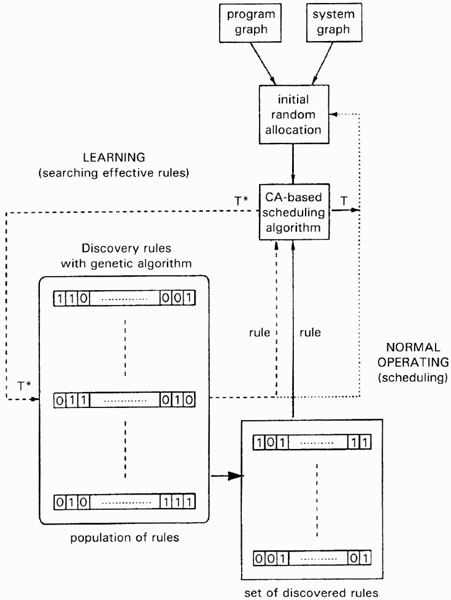
Figure 7.13 The architecture of a CA-based scheduler.
In the learning mode, CA rules are discovered by the GA. It is expected that the rules will be suitable for solving the scheduling problem for any initial allocation of the tasks for a given instance of the problem. The tasks of the program graph representing a given instance of the problem are initially randomly allocated to processors of the parallel system. The CA is built for the program graph and a predefined type of local neighborhood.
An initial population of GA, containing rules is created. For a given random allocation of the program graph into the system graph, the CA is initialized and equipped with the rule from the population of rules. CA evolves its states during a predefined number of steps, which results in changing the allocation of the tasks of the program graph.
The response time T for the final allocation is evaluated. For a given rule this evaluation procedure is repeated a predefined number of times for a set of test problems represented by different initial allocations. This results in evaluation of some fitness value T* for the rule, which is the sum of T values ...
Read now
Unlock full access






