September 2024
Intermediate to advanced
620 pages
13h 38m
German
Diese Arbeit wurde mithilfe von KI übersetzt. Wir freuen uns über dein Feedback und deine Kommentare: translation-feedback@oreilly.com
In diesem Kapitel wirst du die Verwendung verschiedener Motorentypen mit dem Raspberry Pi untersuchen. Dazu gehören Gleichstrommotoren, Servomotoren und Schrittmotoren.
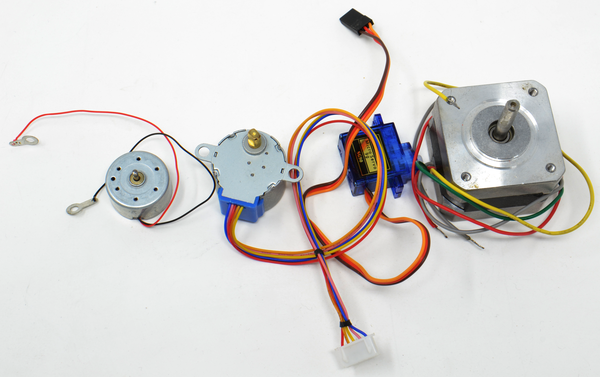
Motoren gibt es in allen Formen und Größen(Abbildung 12-1). Am gebräuchlichsten ist der einfache Bürsten-Gleichstrommotor, den du vielleicht in einem Spielzeugauto findest. In diesem Kapitel befassen wir uns auch mit Servomotoren, bei denen die Position der Motorwelle durch vom Raspberry Pi erzeugte Impulse eingestellt wird, und mit Schrittmotoren, die sich nicht gleichmäßig drehen, sondern, wie der Name schon sagt, in winzigen Schritten, wenn ihre Spulen nacheinander erregt werden.
Du möchtest einen Raspberry Pi verwenden, um die Position eines Servomotors zu steuern.
Verwende die Pulsweitenmodulation (PWM), um die Breite der Impulse für einen Servomotor zu steuern und seinen Winkel zu verändern. Das funktioniert zwar, aber die erzeugte PWM ist nicht ganz stabil, so dass der Servomotor ein wenig ruckelt. Alternative Lösungen, die ein viel stabileres Pulstiming erzeugen, findest du in den Rezepten 12.2 und 12.3.
Wenn du einen Raspberry Pi 1, hast, solltest ...
Read now
Unlock full access






