March 2015
Beginner to intermediate
840 pages
25h 12m
English
We provide an overview of vector calculus statements used throughout Chapter 9. For a detailed treatment of the subject the reader is referred to specialized texts in electromagnetic field theory such as Balanis (1989) or mathematics handbooks like Korn and Korn (1968).
In order to characterize scalar and vector fields, we introduce coordinate systems. A general treatment of orthogonal coordinates can be found in Morse and Feshbach (1953). The three coordinate systems used most often are Cartesian, cylindrical, and spherical. Cartesian coordinates are illustrated in Figure D.1.
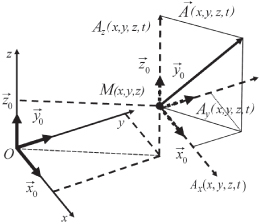
Figure D.1 Vectors representation in Cartesian coordinates.
Here one has three orthogonal axes — ![]() , and
, and ![]() — with origin O. A standard basis of three unit vectors corresponding to those axes is designated as (
— with origin O. A standard basis of three unit vectors corresponding to those axes is designated as (![]() ). Let vector
). Let vector ![]() be measured by a sensor located at point M with coordinates . To expand the vector into a sum of Cartesian projections one first moves the basis ...
be measured by a sensor located at point M with coordinates . To expand the vector into a sum of Cartesian projections one first moves the basis ...
Read now
Unlock full access






