强化学习
|
525
注意,可能根本没有任何正奖励。例如,智能体可能在迷宫中四处走动,在每个步骤中
都获得负奖励,因此最好尽快找到出口!强化学习还有许多其他适合的任务,例如自动
驾驶汽车、推荐系统、在网页上放置广告或控制图像分类系统应集中注意力的地方。
18.2 策略搜索
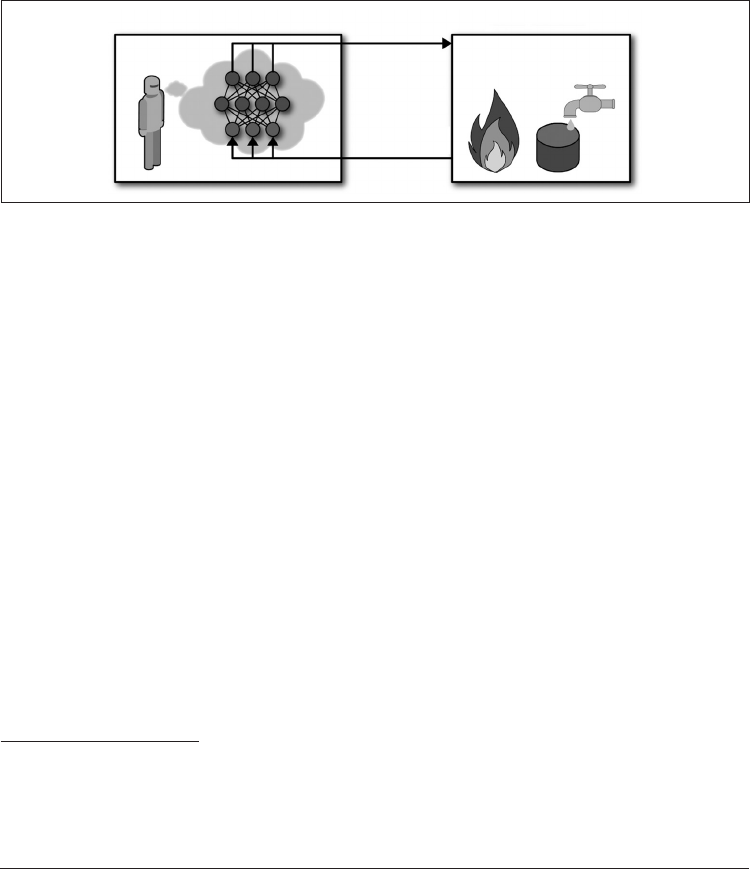
软件智能体用来确定其动作的算法称为其策略。该策略可以是一个神经网络,将观察作
为输入并输出要采取的行动(见图 18-2)。
智能体 环境
策略
奖励和观察
动作
图 18-2:使用神经网络策略进行强化学习
该策略可能是你能想到的任何算法,并且不必具有确定性。实际上,在某些情况下,甚
至不需要观察环境!例如,考虑一个机器人吸尘器,其奖励是在 30 分钟内吸走的灰尘
量。它的策略可能是以每秒概率
p
向前移动,或以概率 1
-
p
随机向左或向右旋转。旋转
角将是
-
r
和 +
r
之间的随机角度。由于此策略涉及某种随机性,因此称为随机策略。机
器人具有不确定的轨迹,这保证了它最终将到达任何位置并拾起所有灰尘。问题是,在
30 分钟内会吸走多少灰尘?
你将如何训练这样的机器人?你可以调整两个策略参数:概率
p
和角度范围
r
。一种
可能的学习算法可能是为这些参数尝试许多不同的值,然后选择效果最佳的组合(见
图 18-3)。这是策略搜索的示例,在这种情况下使用暴力解决方法。当策略空间太大时
(通常是这种情况),以这种方式查找一组好的参数就像大海捞针一样。
探索策略空间的另一种方法是使用遗传算法。例如,你可以随机创建第一代 100 条策略
并进行尝试,然后“杀死”80 条最差的策略