170
|
第
6
章
CART 算法的工作原理与以前的方法大致相同,不同之处在于,它不再尝试以最小化不
纯度的方式来拆分训练集,而是以最小化 MSE 的方式来拆分训练集。公式 6-4 给出了算
法试图最小化的成本函数。
公式 6-4:CART 回归成本函数
其中
Jkt( , ) MSE MSE
k
MSE ( )
y
ˆ
node
= +
m
mm
=
node node
left
i∈
∑
=
node
m
i∈
node
∑
node
y
()
left right
i
yy
ˆ
m
right
−
() 2i
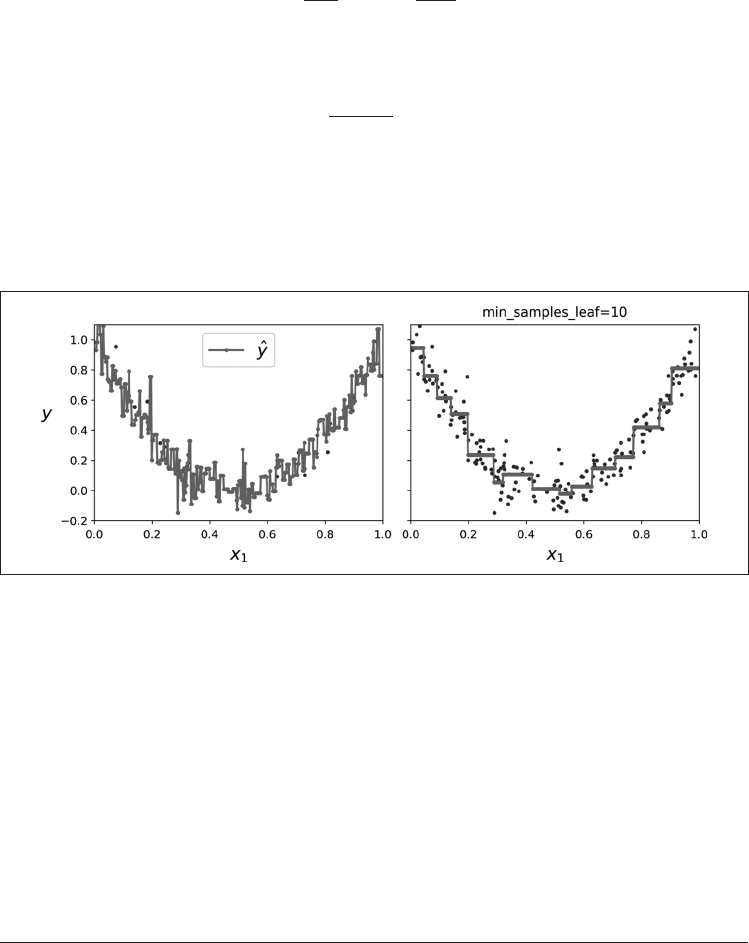
就像分类任务一样,决策树在处理回归任务时容易过拟合。如果不进行任何正则化(如
使用默认的超参数),你会得到图 6-6 左侧的预测。这些预测显然非常过拟合训练集。只
需设置 min_samples_leaf = 10 就可以得到一个更合理的模型,如图 6-6 右侧所示。
没有限制
图 6-6:正则化一个回归决策树
6.9 不稳定性
希望到目前为止,你已经确信决策树有很多用处:它们易于理解和解释、易于使用、用
途广泛且功能强大。但是,它们确实有一些局限性。首先,你可能已经注意到,决策树喜
欢正交的决策边界(所有分割都垂直于轴),这使它们对训练集旋转敏感。例如,图 6-7
显示了一个简单的线性可分离数据集:在左侧,决策树可以轻松地对其进行拆分,而在
右侧,将数据集旋转 45 度后,决策边界看起来复杂了(没有必要)。尽管两个决策树都
非常拟合训练集,但右侧的模型可能无法很好地泛化。限制此问题的一种方法是使用主
成分分析(见第 8 章),这通常会使训练数据的方向更好。 ...