Networking TurtleBot 3 and the remote computer
The TurtleBot 3 and remote computer must be configured to set up communications on the same network. Each computer's IP address should be identified and used to establish the ROS environment variable for the communication system. The following figure shows how these variables are identified:
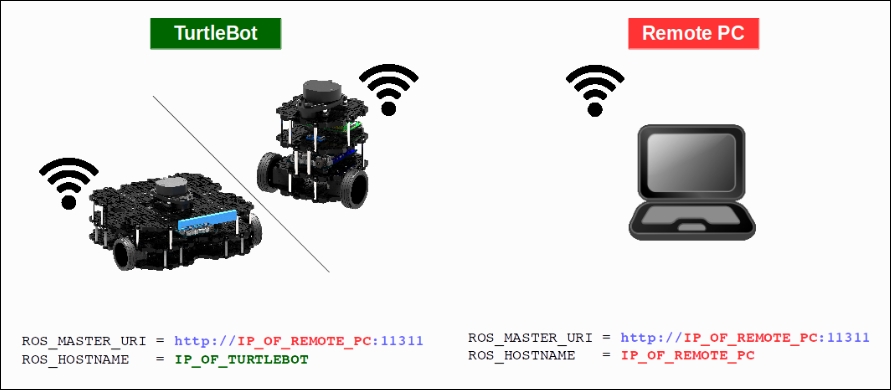
TurtleBot 3 and remote computer ROS network configuration
Note that the TurtleBot 3 and the remote computer identify the remote computer IP address as the ROS_MASTER_URI variable. This setup is different than that for the ROS variables for TurtleBot 2. For TurtleBot 3, the Master resides on the remote computer.
The ...
Get ROS Robotics By Example - Second Edition now with the O’Reilly learning platform.
O’Reilly members experience books, live events, courses curated by job role, and more from O’Reilly and nearly 200 top publishers.

