140 Fundamentals of Wearable Computers and Augmented Reality
6.5.2.1 Free Camera Motion
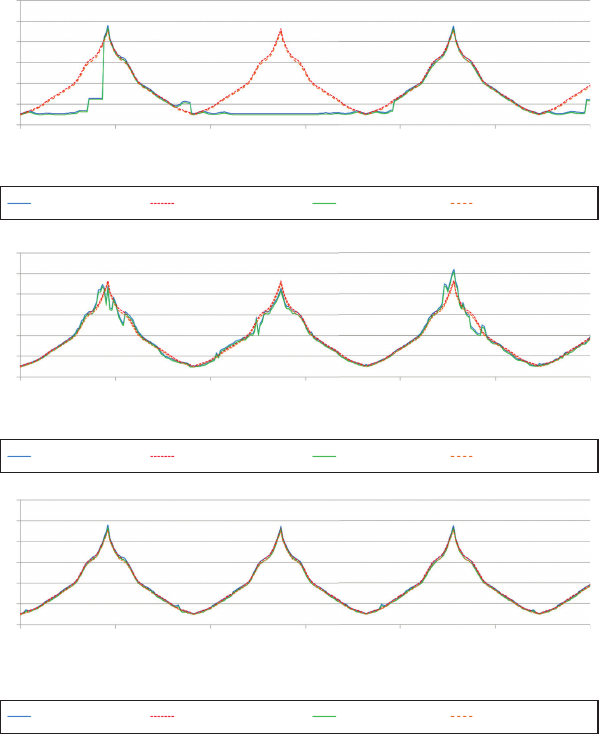
In this case, the camera moves freely in the simulated environment, which includes
a translation, a rotation, and zooming. Figures 6.10 and 6.11 show the results of the
estimated intrinsic parameters (f
x
, f
y
, u, v) and the ground truth value for each frame.
In these gures, the method for the monocular camera is labeled as Method A and
the method for the stereo camera is notated as Method B. It should be noted that
Bujnak’s method (Bujnak etal. 2010) cannot estimate the centers of the projections.
Figure 6.11 shows the results of Methods A and B only. These ...