410
■
Handbook on Mobile and Ubiquitous Computing: Status and Perspective
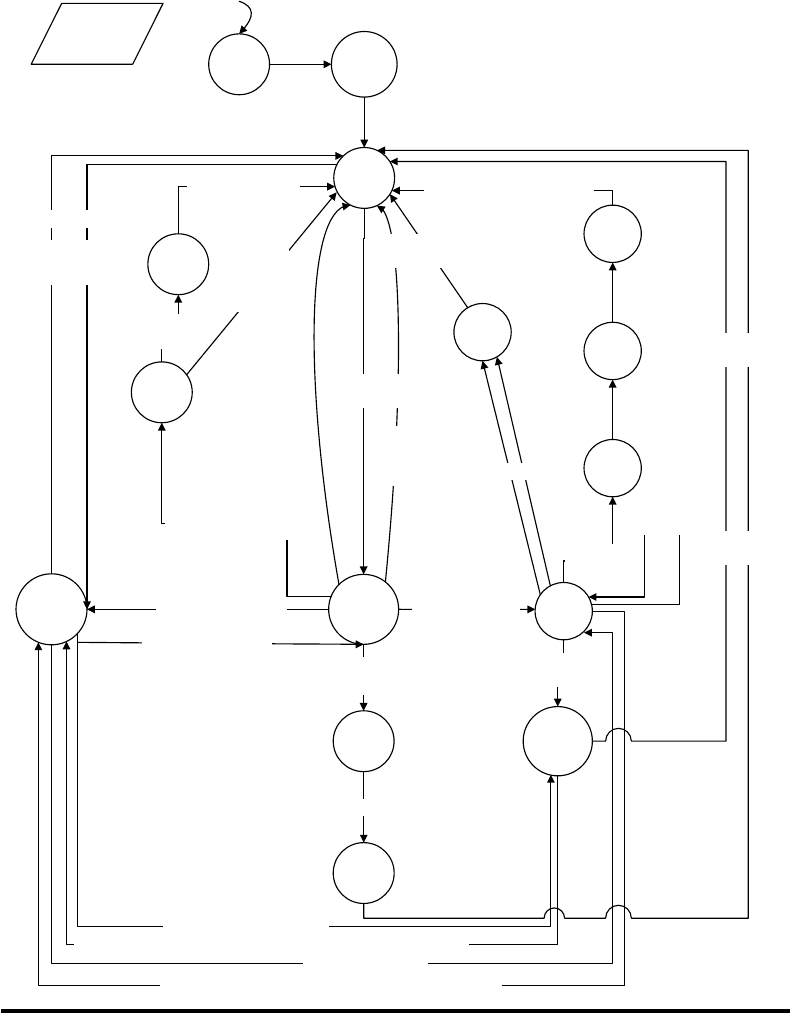
Controller
(Controll
er_init)
Control_
stop_
alarm
Record
Start_
alarm
Close_
door
Open_
door
Show_
MSG
Read
Checker_send_
controller_SIG
Result = = PWD_OK &&
~ ALARM_ON, doortimer: = 0
Result = = supervisor
, selectiontimer: = 0
Doortimer = = door_TO
Result = = PWD_ERROR
&& ~ ALARM_ON
Error_count > =
MAX_ERROR
ALARM_ON &&
alarm timer = = alarm_TO
state: = read
Error_count <
MAX_ERROR,
controller_send_
input_SIG
Controller_send
_input_SIG
Control_
init
Controller_send
_input_SIG
Result = = ID_ERROR
&& ~ ALARM_ON,
controller_send_
input_SIG
Controller_send_input_SIG;
alarmtimer: = 0
Controller
_stop_
alarm
ALARM_ON && ...






